
Multi-turn error — clearing procedure (AI Worker)
If you see logs like the following while running bringup, a multi-turn error has occurred.
[ros2_control_node-1] [ID:034] RX_PACKET_ERROR : [RxPacketError] Hardware error occurred. Check the error at Control Table (Hardware Error Status)!
[ros2_control_node-1] [comm_id:034][ID:034] Request ping - RX_PACKET_ERROR : [RxPacketError] Hardware error occurred. Check the error at Control Table (Hardware Error Status)!
[ros2_control_node-1] [ReadItem][ID:034][comm_id:034] RX_PACKET_ERROR : [RxPacketError] Hardware error occurred. Check the error at Control Table (Hardware Error Status)!
[ros2_control_node-1] [comm_id:034][ID:034] Error Code Details: 0xc (Multi-turn Error): An issue has occurred with the Multi-turn IC
[ros2_control_node-1] [ID:034] Rebooting...In this example, the multi-turn error is on Dynamixel ID 34.
Use the steps below to clear the multi-turn error.
How to clear the multi-turn error
1. Align the home position
Press the E-stop, align the slit marks while moving the arm toward the home (zero) position, then release the E-stop once alignment is complete.
You only need to set the pose for the joint(s) you plan to clear (for example, the Dynamixel ID shown in the error log). It is not required to align every joint on the arm if the fault is isolated—but keep the arm supported and safe while doing so.
Important: When you perform the multi-turn Clear in Dynamixel Wizard later (Tools → Encoder battery change), the robot must still be in this physically correct alignment. The clear procedure assumes the mechanism matches the home / slit reference at that moment; if the pose is wrong, the encoder state may not clear correctly or the arm may not behave as expected afterward.
Home positions (joint index, Dynamixel ID): the figures below are left arm references. Use the same idea for the right arm if you are clearing servos on that side.
- Joint 1 (ID 1, 31)

- Joint 2 (ID 2, 32)

- Joint 3 (ID 3, 33)

- Joint 4 (ID 4, 34)

- Joint 5 (ID 5, 35)

- Joint 6 (ID 6, 36)

2. Set up and start the noVNC container
INFO
⚠️ noVNC and Cyclo Manager
Previously, AI Worker repository provided noVNC compose directly. After Cyclo Manager was introduced, the noVNC container is managed from Cyclo Manager instead. Starting with AI Worker 1.2.2, the noVNC Compose file is no longer shipped with AI Worker.
Method 1: Install Cyclo Manager
(How to Install Cyclo Manager).
In a Web Browser(like Chrome), open
http://ffw-snpr48a{serial-number}.local:3000, substituting your robot’s serial number forserial-number. (e.g.http://ffw-snpr48a0000.local:3000)Then navigate Cyclo Manager -> AI worker -> noVNC Page and click the NOVNC Server Start button on the top and reload the page(f5).
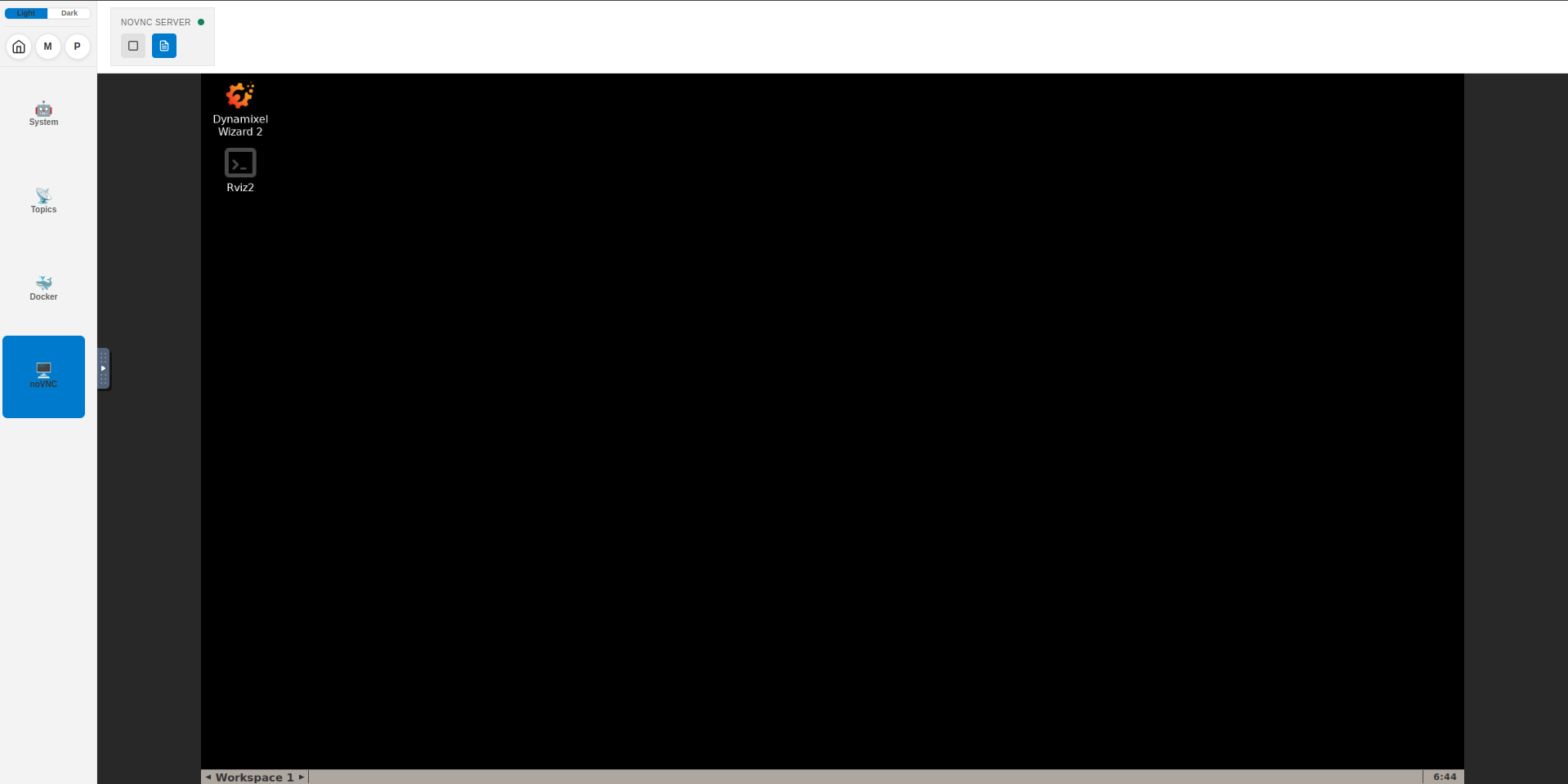
Click the
Dynamixel Wizard 2.0icon to open the Dynamixel Wizard 2.0.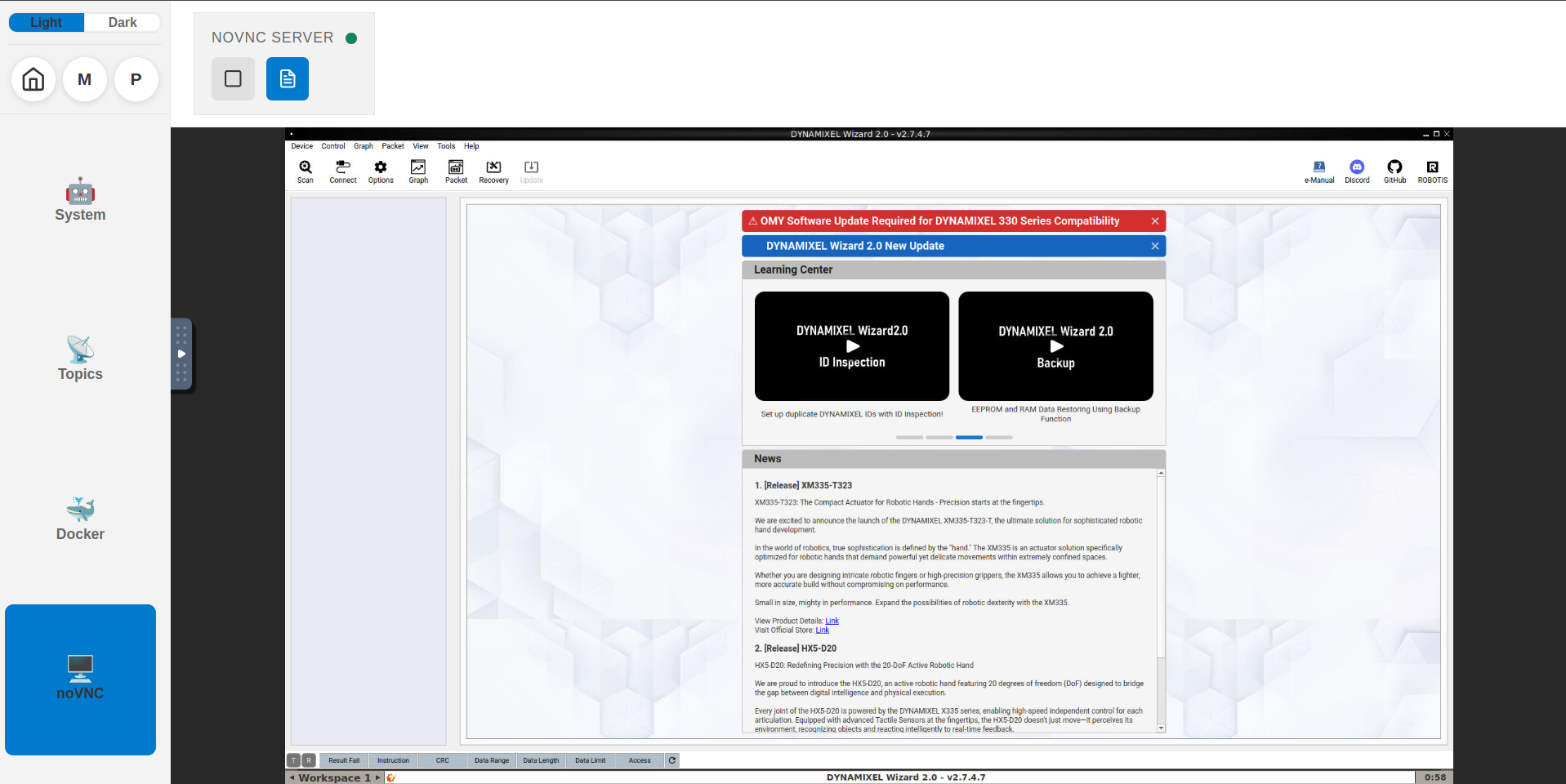
Method 2: Make a docker-compose.novnc.yml file with the following content:
docker-compose.novnc.yml
services:
novnc-server:
container_name: novnc-server
image: robotis/novnc-server:latest
restart: no
cap_add:
- SYS_NICE
ulimits:
rtprio: 99
rttime: -1
memlock: 8428281856
network_mode: host
environment:
- ROS_DOMAIN_ID=${ROS_DOMAIN_ID:-30}
- DISPLAY=:99
- DISPLAY_WIDTH=1920
- DISPLAY_HEIGHT=1080
- WEBSOCKIFY_PORT=8090
volumes:
- /dev:/dev
- /dev/shm:/dev/shm
privileged: trueThen run docker compose -f docker/docker-compose.novnc.yml up to start the noVNC container and browse http://ffw-snpr48a{serial-number}.local:8090 in a web browser. Click the connect button and open the Dynamixel Wizard 2.0. 
3. Configure Dynamixel Wizard 2.0 and run Scan
In Dynamixel Wizard 2.0, configure the following and run Scan:
- Select protocol to scan: Protocol 2.0
- Select port to scan: /dev/ttyUSB4 (When connecting an LG2 leader, scan ports from ttyUSB4 to ttyUSB6)
- Baud rate: 4000000 bps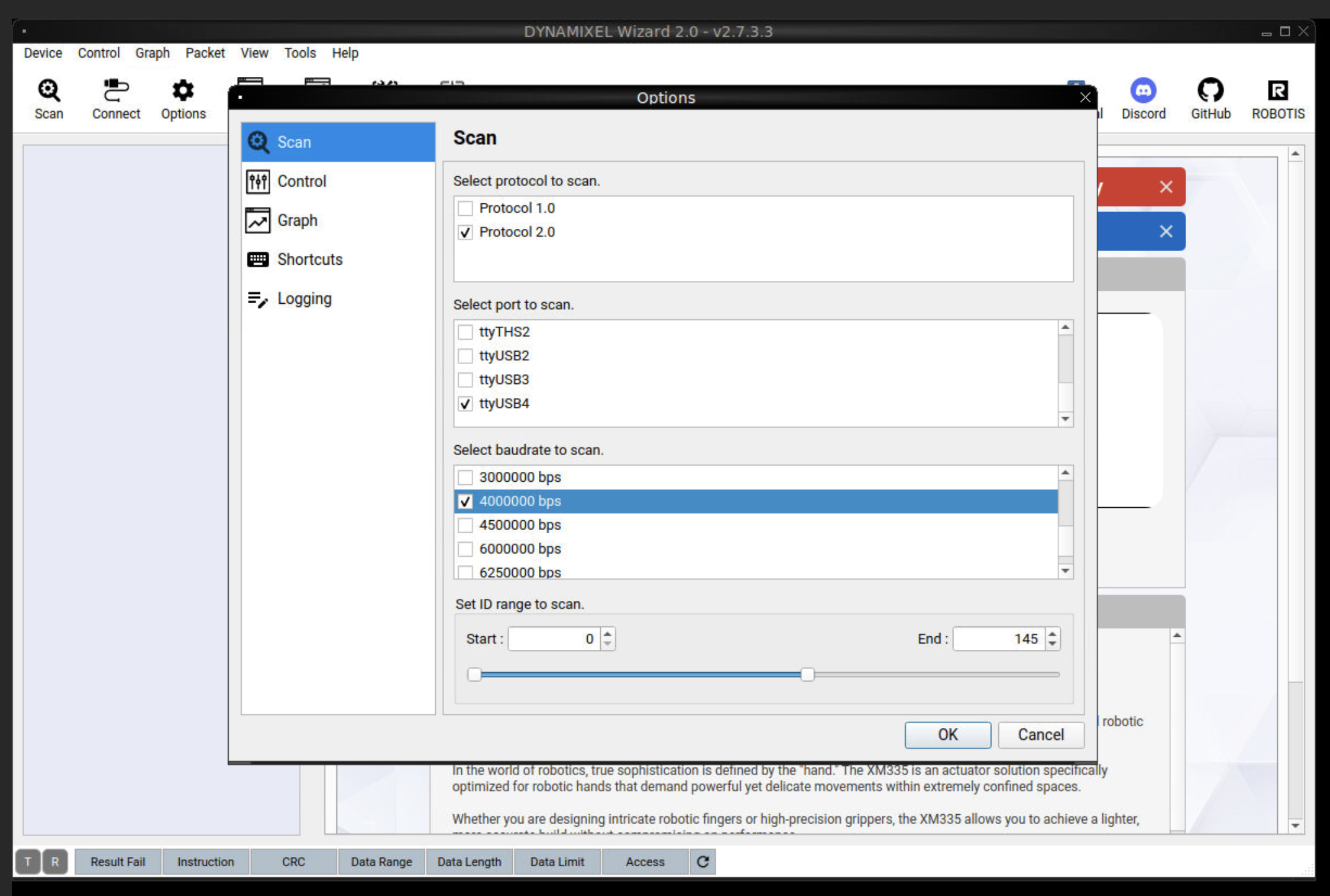
4. Select the Dynamixel that reported the error
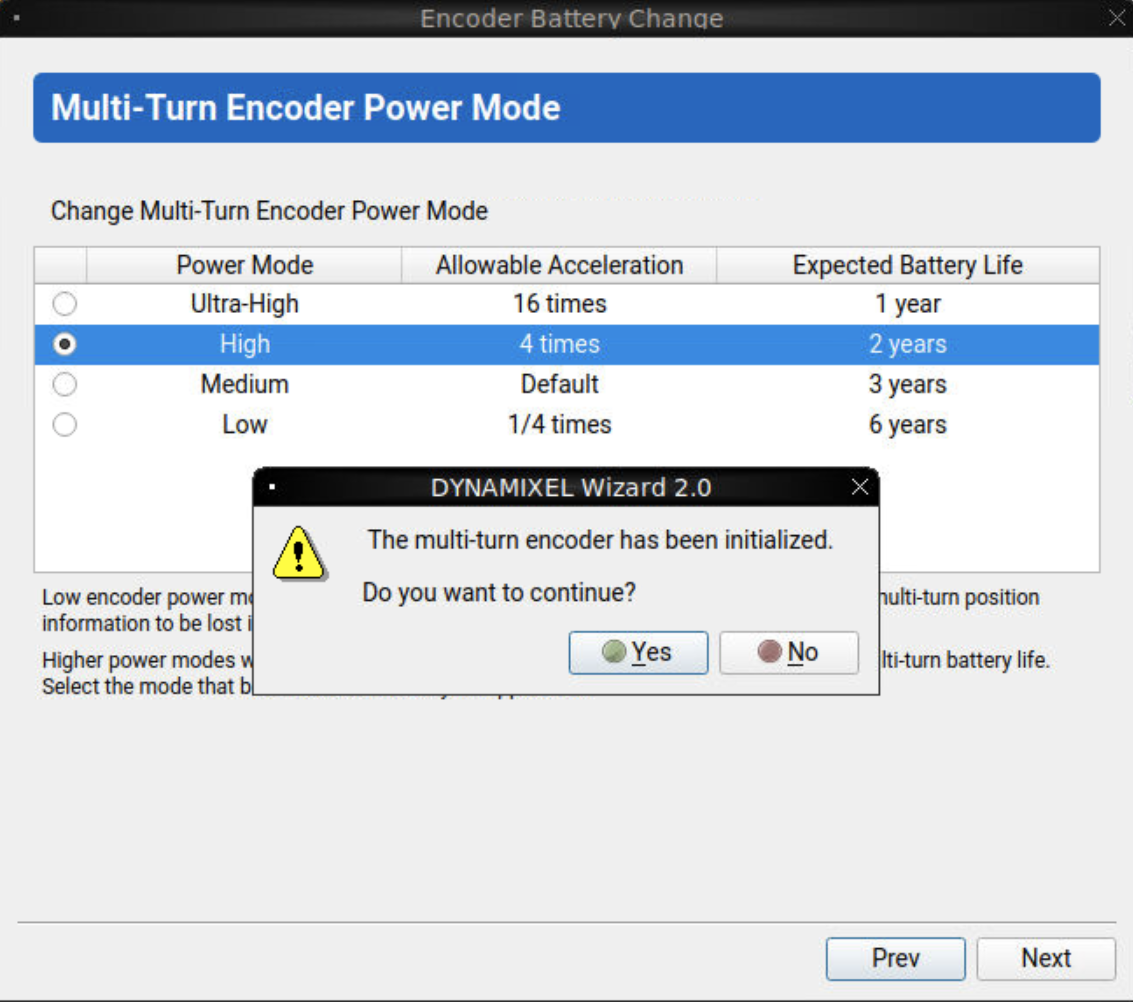
Select the Dynamixel that reported the error, then choose Tools → Encoder battery change from the top menu. 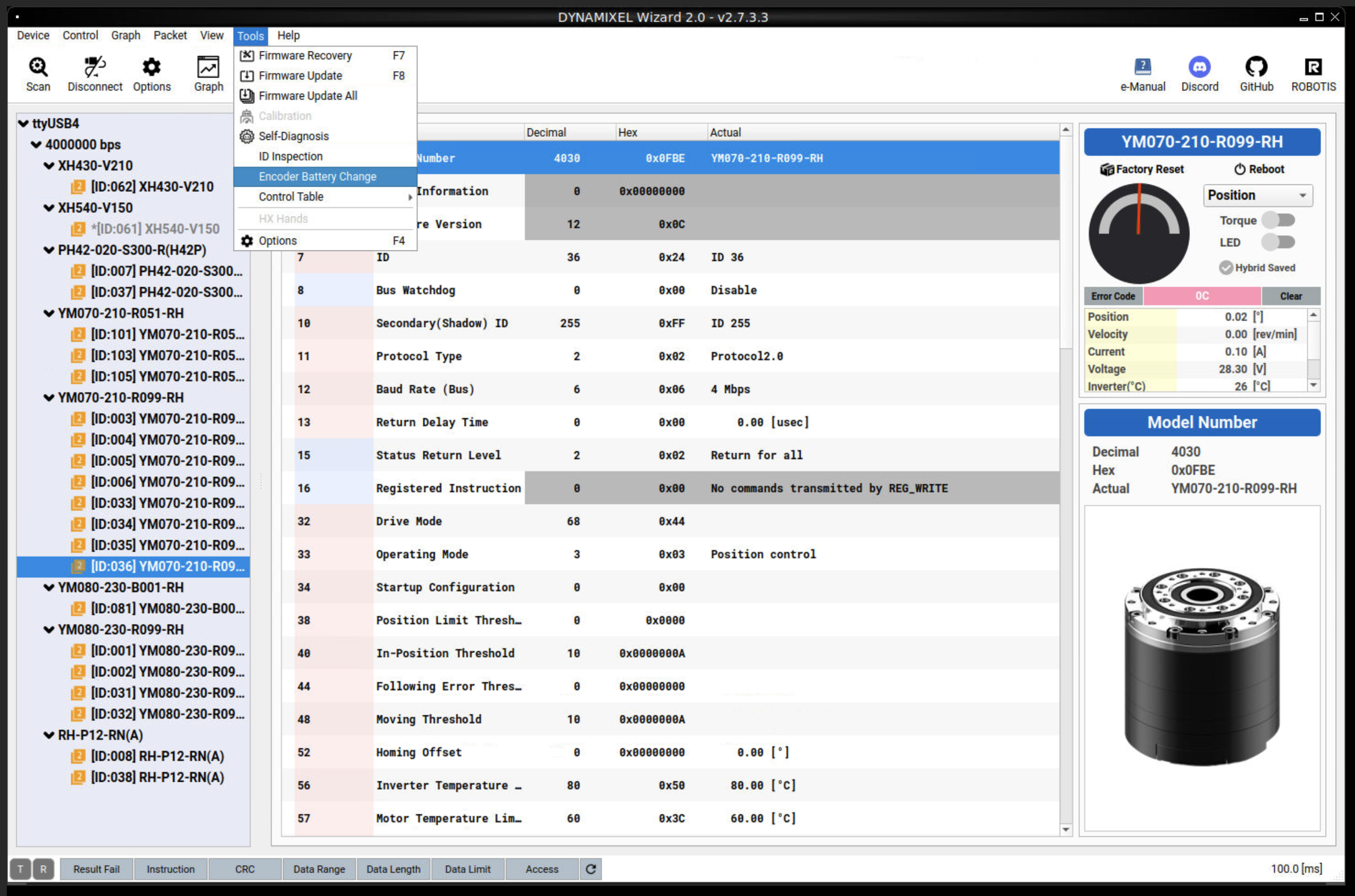
5. Clear the multi-turn error
Set Multi-turn encoder power mode to High, then perform Clear.
6. Verify with bringup
Run bringup again and confirm the error no longer appears.