
ROBOTIS · Humanoid
Open-Source Humanoid Platform for Physical AI powered by DYNAMIXEL-Q.

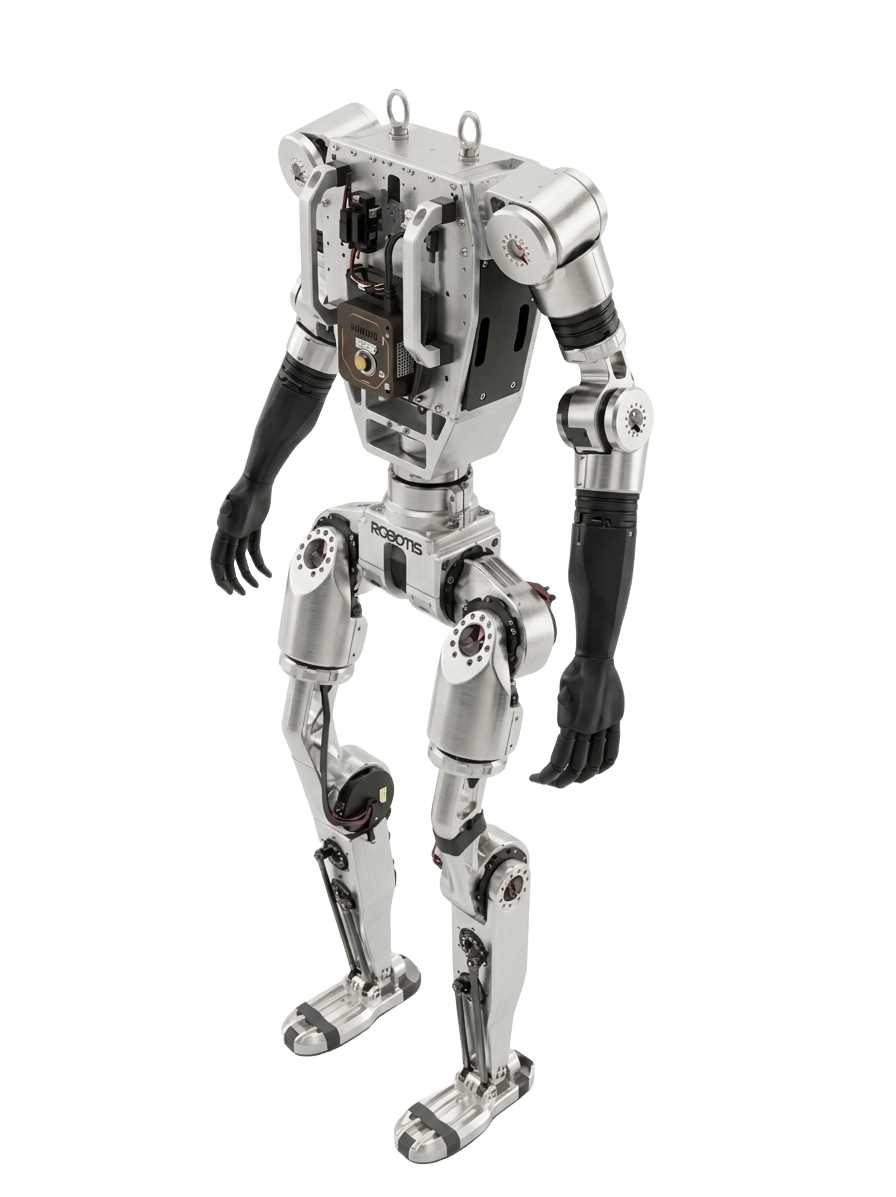
K0 - The First Step in AI Sapiens
TIP
| Height | 1.3 m (1300 mm) |
| Weight | 34 kg |
| DOF | 23 (whole-body) |
| Actuators | Dynamixel Q (QM-060 ×14, QM-080 ×9) |
| Stack | Fully open source: hardware BoM, CAD (STEP) files, source code, simulation assets, and tutorials. |
A humanoid only earns the name when motion survives the real world: contact, backlash, power limits, and sensor noise. AI Sapiens is ROBOTIS’s humanoid platform built on Dynamixel Q, so policies trained with imitation learning and reinforcement learning can be deployed on real hardware, not only in simulation.
Physical AI, here, means intelligence that closes the loop on hardware, sensing, actuation, and real-world dynamics, not only in simulation.
K0 is the first humanoid in that line: the baseline hardware and software others extend, with training artifacts and documentation shipped open source so research, education, and product work share one reproducible starting point, not a black box.
Key Features
Platform for Physical AI
Documentation, simulation, and control oriented toward policies that you can train and refine for real contact and dynamics, not toy demos.
Fully Open-Source Platform
Repositories and learning materials are released to be forked, audited, and built on, with no guesswork about what runs on the robot.
Powered by Dynamixel Q
QDD(Quasi-Direct Drive) actuators built in-house: efficiency, low backlash, and torque-level control suited to dynamic balancing and manipulation.
23 DOF Full-Body Motion
Head, arms, legs, and waist mapped for locomotion and upper-body tasks. The joint layout matches the detailed spec tables below.
Teaser Video
Reinforcement Learning
AI Sapiens is developing reinforcement learning-based locomotion technology using DYNAMIXEL-Q actuators, which help minimize the sim-to-real gap. Training is conducted in NVIDIA Isaac Sim, enabling precise physical simulation and large-scale iterative learning. Through this approach, AI Sapiens is demonstrating strong real-world applicability in humanoid robot environments. By closely connecting simulation and real-world deployment, AI Sapiens is advancing more stable, precise, and next-generation humanoid locomotion technology.
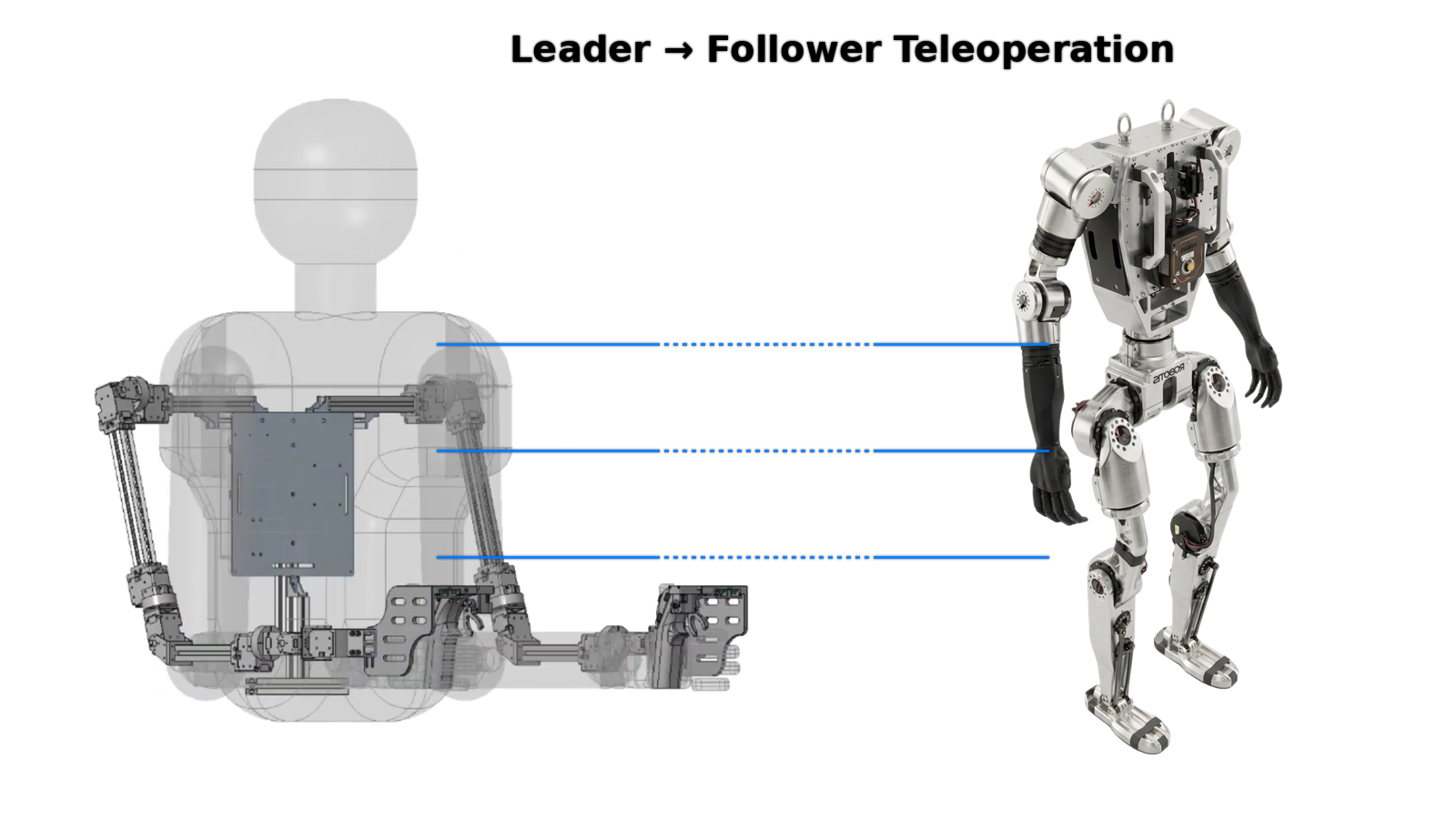
Imitation Learning
AI Sapiens enables a complete pipeline for imitation learning, covering data collection, training, and inference. Data can be captured through the leader–follower system, allowing human motions and demonstrations to be directly recorded and structured for learning. Physical AI tools make it easy to train models and run inference, reducing the complexity of deploying learned behaviors on real hardware.
Through this pipeline, policies trained from demonstrations can be seamlessly transferred to real robots, enabling natural and adaptive behaviors. The system is designed to bridge the gap between data collection and real-world execution, allowing users to iterate quickly and develop robust robotic skills with minimal overhead.
Specification
Exploded View
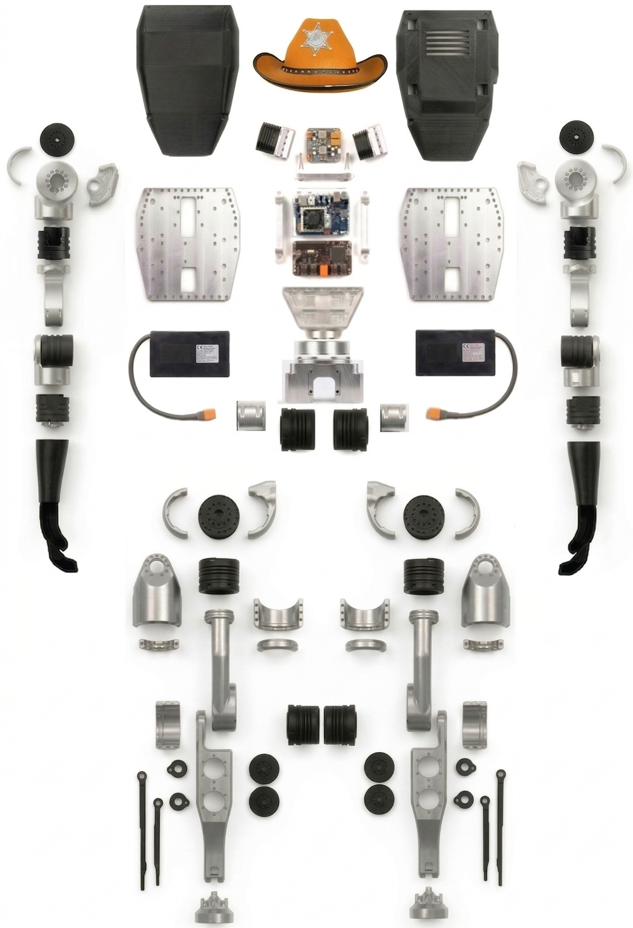
Physical Specification
K0 is a humanoid platform with a height of 1300 mm and a weight of 34 kg. It features a total of 23 degrees of freedom, 5 in each arm, 6 in each leg, and 1 in the waist. The system supports a maximum arm payload of 3 kg.
| Item | Specification |
|---|---|
| Height | 1300 mm |
| Weight | 34 kg |
| Degrees of freedom | 23 total (each arm: 5, each leg: 6, waist: 1) |
| Max arm payload | 3 kg |
Actuators
AI Sapiens K0 is powered by DYNAMIXEL-Q actuators, including the QM-060 and QM-080, which are part of ROBOTIS’s latest generation of QDD (Quasi-Direct Drive) actuators. Building on its long-standing expertise in robotic actuators, ROBOTIS developed QDD technology and applied it to humanoid systems such as AI Sapiens.
DYNAMIXEL-Q is a QDD (Quasi-Direct Drive) actuator that combines a low gear reduction ratio with a high-torque motor and integrated control electronics. It enables high backdrivability, low impedance, and precise torque control, making it well-suited for dynamic and compliant motions in humanoid and robotic applications.
INFO
DYNAMIXEL-Q is scheduled for release in the second half of the year.(The schedule is subject to change)
The details on this page are subject to change as the product approaches launch.
For any additional inquiries, contact us at contactus2@robotis.com
QM-060
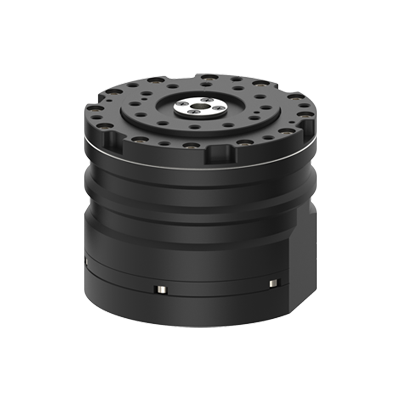
| Item | Specification |
|---|---|
| Motor Type | Inner Rotor |
| Input Voltage | 48 V |
| Gear ratio | 12:1 / 16:1 / 20:1 |
| Size | Ø58 x 60 mm |
| Weight | 450 g |
| Hollow Bore Diameter | Ø5 mm |
QM-080
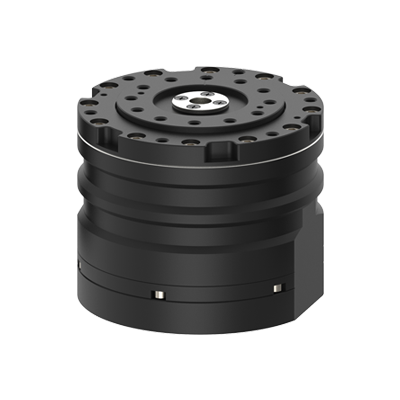
| Item | Specification |
|---|---|
| Motor Type | Inner Rotor |
| Input Voltage | 48 V |
| Gear ratio | 12:1 / 16:1 / 20:1 |
| Size | Ø78 x 65 mm |
| Weight | 850 g |
| Hollow Bore Diameter | Ø7 mm |
Compute
For computation, K0 is equipped with Jetson Orin NX 16GB (ONX 16GB), featuring an NVIDIA Ampere GPU, an Arm Cortex-A78AE v8.2 64-bit CPU, and AI performance of up to 100 Sparse INT8 TOPS / 50 Dense INT8 TOPS.
| Item | Specification |
|---|---|
| Module | Jetson Orin NX 16GB (ONX 16GB) |
| CPU | Arm Cortex-A78AE v8.2 64-bit CPU |
| GPU | NVIDIA Ampere GPU |
| AI Performance | Up to 100 Sparse INT8 TOPS / 50 Dense INT8 TOPS |
Interfaces
In terms of connectivity, it supports Wi-Fi 5 and Bluetooth 5.0 (RTL8822CE). The platform provides multiple interfaces, including 2 Ethernet ports, USB 2.0 ×2 (USB-A), USB 3.0 ×2 (1 USB-C, 1 USB-A), and power outputs of 24 V (up to 10 A) and 12 V (up to 10 A).
| Item | Specification |
|---|---|
| Wireless | Wi-Fi 5, Bluetooth 5.0 (RTL8822CE) |
| Ethernet | ×2 |
| USB 2.0 | ×2 (USB-A) |
| USB 3.0 | ×2 (1× USB-C, 1× USB-A) |
| Power outputs | 24 V (up to 10 A), 12 V (up to 10 A) |
Power
K0 is powered by a 46.8 V, 9000 mAh battery.
| Item | Specification |
|---|---|
| Battery | 46.8 V, 9000 mAh |
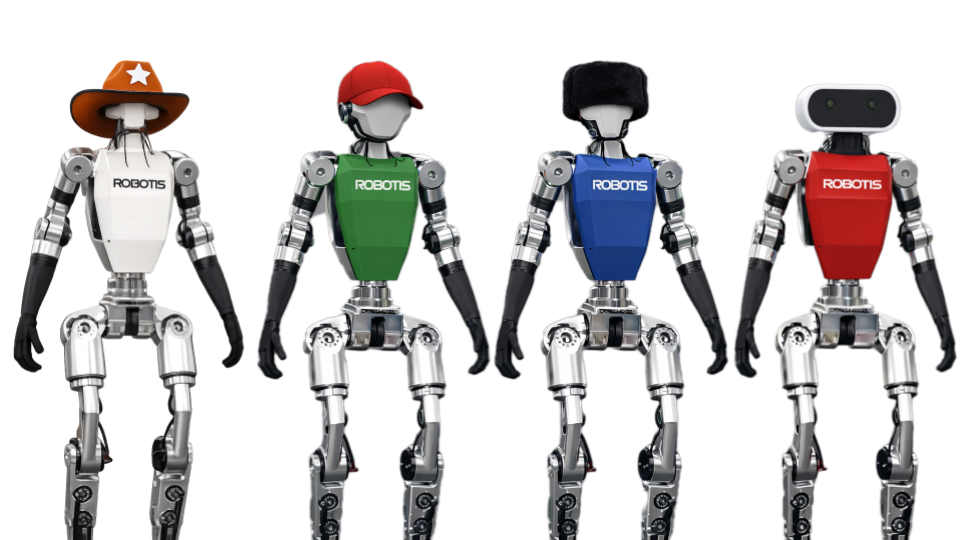
Costume Options
AI Sapiens lets you create a unique humanoid using a variety of customizable exterior parts, including hats, head covers, and body covers.
INFO
The default front and rear body covers and head are provided as open source 3D printable files, giving you the flexibility to modify and extend the design as needed.

Open Source
AI Sapiens is being prepared as a fully open platform. The resources below will be released in stages.
Hardware BoM
TIP
The complete Bill of Materials for K0 (parts list, quantities, and references) will be published for reproducible builds.
STEP Files
TIP
Mechanical STEP files for core assemblies will be provided so teams can inspect, modify, and integrate hardware quickly.
Source Code
TIP
Core software repositories, setup instructions, and example pipelines will be released for direct use and extension.
Simulation Assets
TIP
Simulation assets and environment packages will be shared to support training, validation, and sim-to-real workflows.
Tutorials
TIP
Step-by-step tutorials from bring-up to policy deployment will be added so new users can get started fast.
More Information and Questions
If you have any questions or would like more information, please reach out on our Discord and we will respond as quickly as possible. You can also learn more about ROBOTIS products and services on our Discord. Join our Discord