
Community Showcase
: Inspiring Projects from Our Users
The DYNAMIXEL ecosystem thrives on the creativity and innovation of our users. We are thrilled to showcase some of the remarkable open-source projects developed by talented individuals, top universities, and pioneering companies around the world. These projects demonstrate the versatile capabilities of DYNAMIXEL actuators and how they empower developers to push the boundaries of robotics.
Discover how your peers are leveraging DYNAMIXEL technology to build the future, one groundbreaking project at a time. Many of these incredible advancements are proudly Powered by DYNAMIXEL.
Projects Using DYNAMIXEL
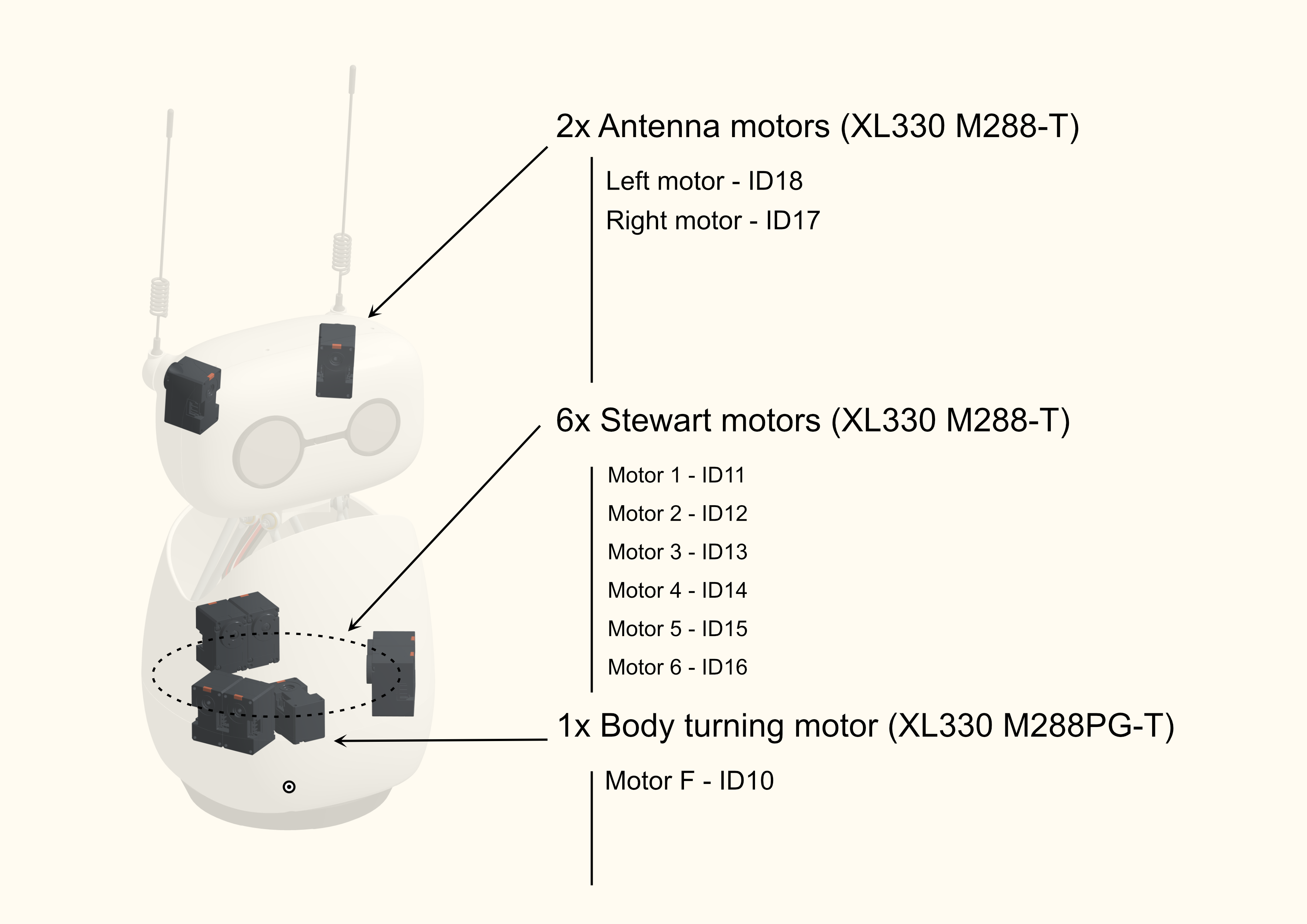
Reachy-Mini
Developed by: Pollen Robotics
Reachy-Mini is a small, agile, and versatile robot designed for research and education in robotics. It uses nine DYNAMIXEL XL330-M288-T actuators.
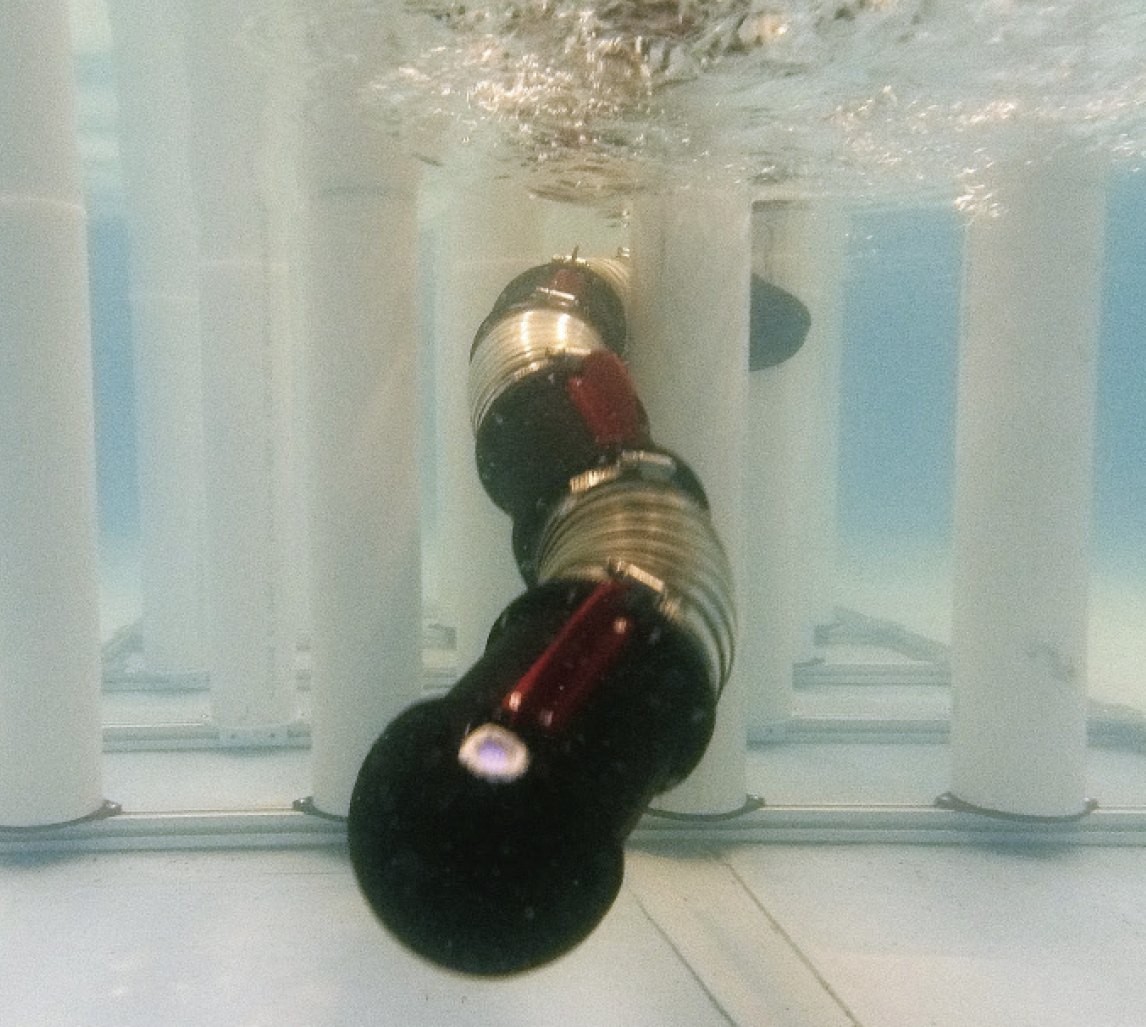
AquaMILR+
Developed by: CRAB Lab
An untethered limbless robot designed for complex aquatic terrain navigation. It uses DYNAMIXEL 2XL430-W250-T and 2XC330-T288-T actuators.
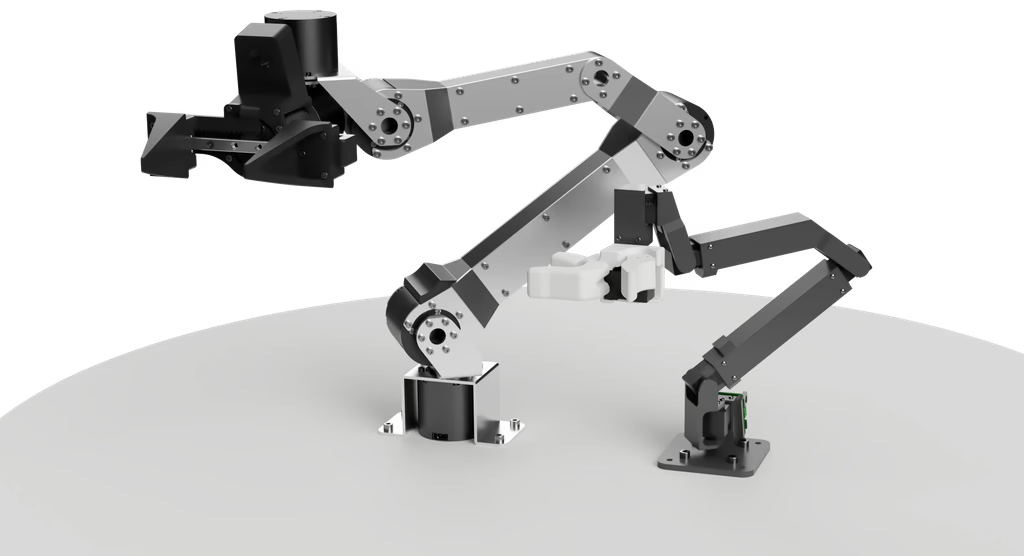
TRLC-DK1
Developed by: The Robot Learning Company
An open source dev kit for AI-native robotics. The leader arm uses seven DYNAMIXEL XL330-M077-T actuators.
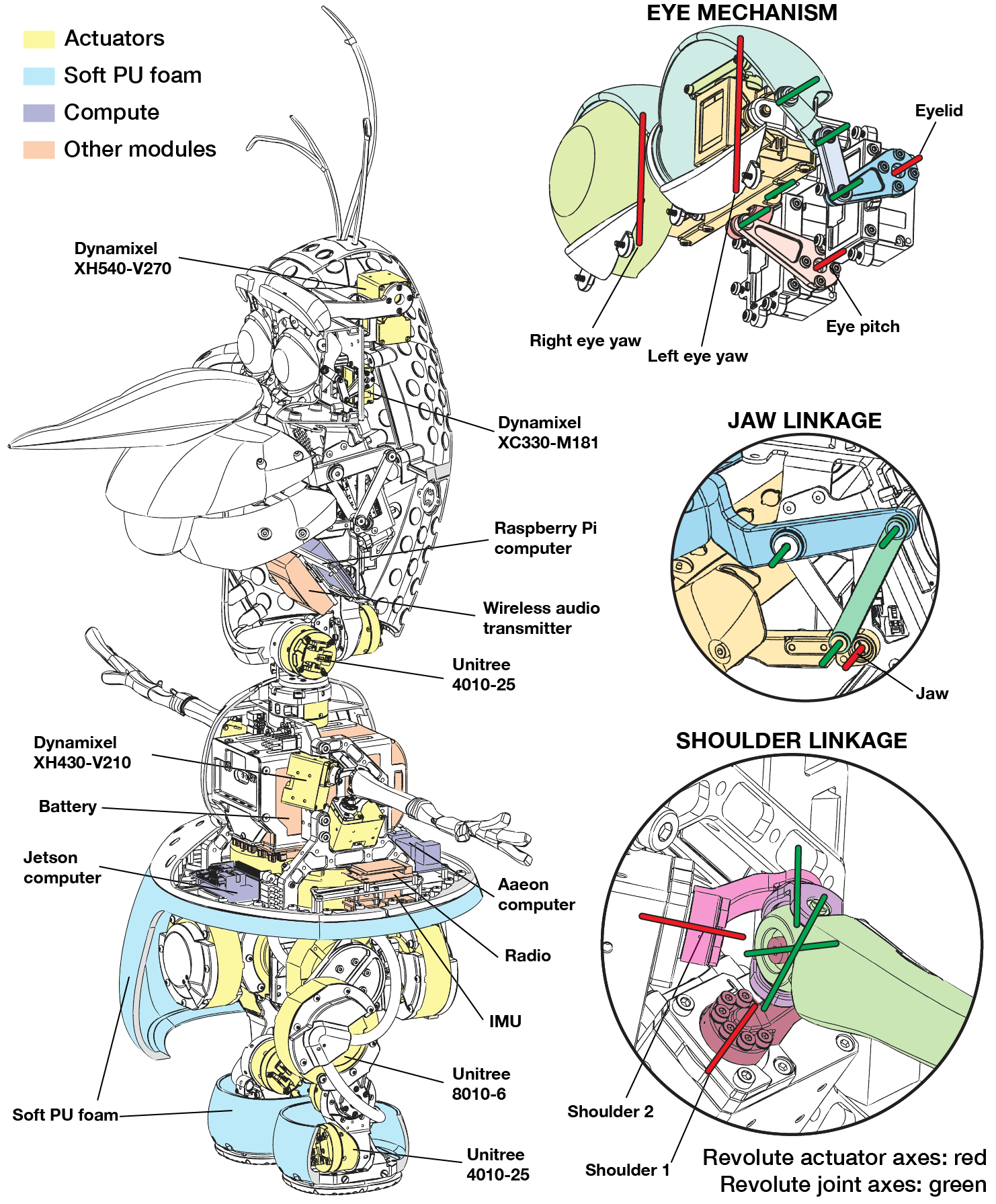
Olaf Robot
Developed by: Walt Disney Imagineering
Disney Imagineering’s physical Olaf robot, controlled with RL using animation references. It uses DYNAMIXEL XH540-V270, XH430-V210, and XC330-M181 actuators.
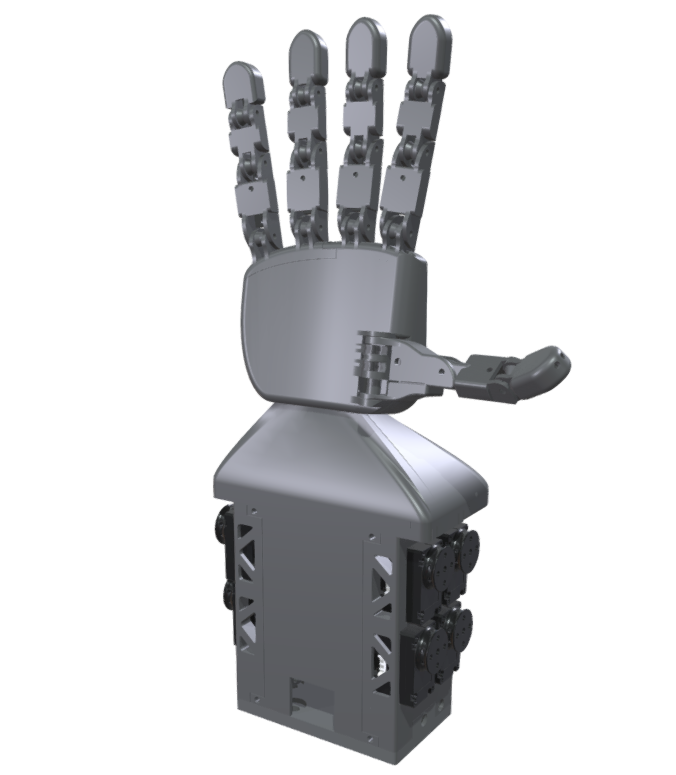
EN02-OP
Developed by: Westwood Robotics
A high-performance, open-source robotic hand designed for advanced manipulation tasks, utilizing DYNAMIXELs for precise control.

LeapHand
Developed by: Carnegie Mellon University
A low-cost, highly capable, and open-source anthropomorphic robotic hand, often integrating DYNAMIXEL actuators.
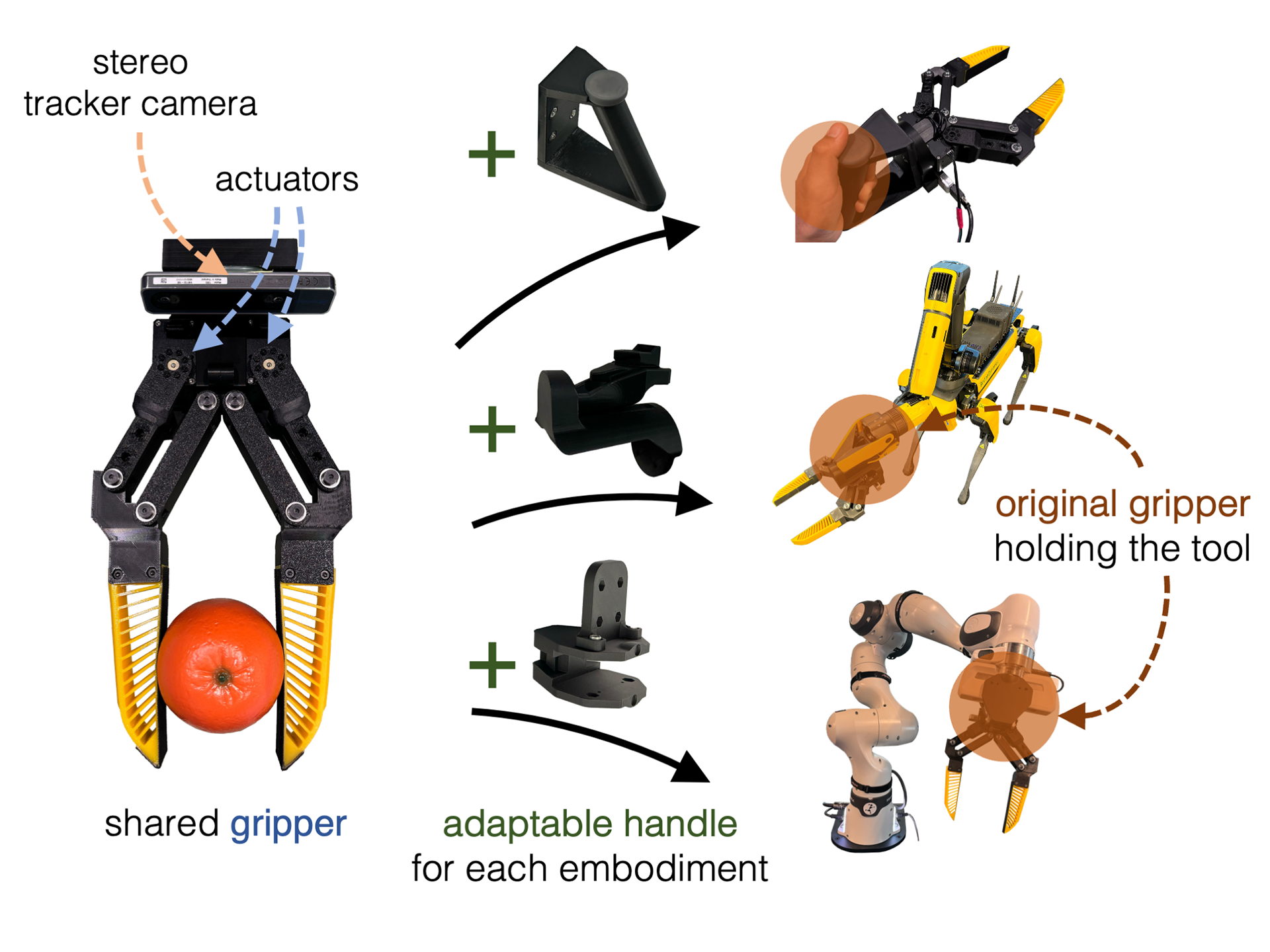
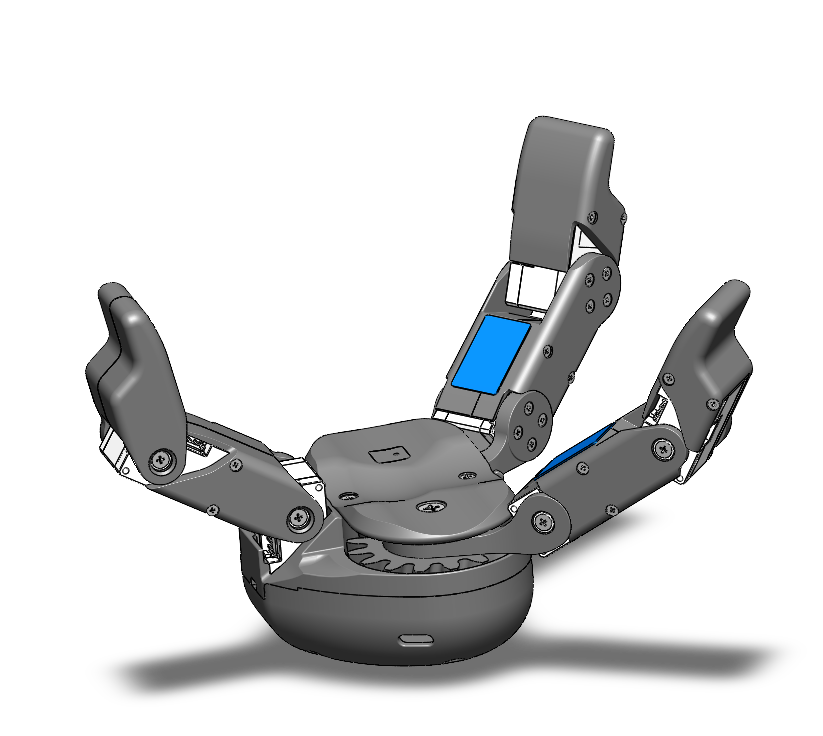
LEGATO
Developed by: The University of Texas at Austin, The AI Institute
An open-source, affordable, and robust robotic hand for research and education, frequently powered by DYNAMIXELs.
OpenHand
Developed by: Yale University
A project focusing on open-source, customizable, and accessible robotic hand designs, with DYNAMIXELs as a common choice for actuation.
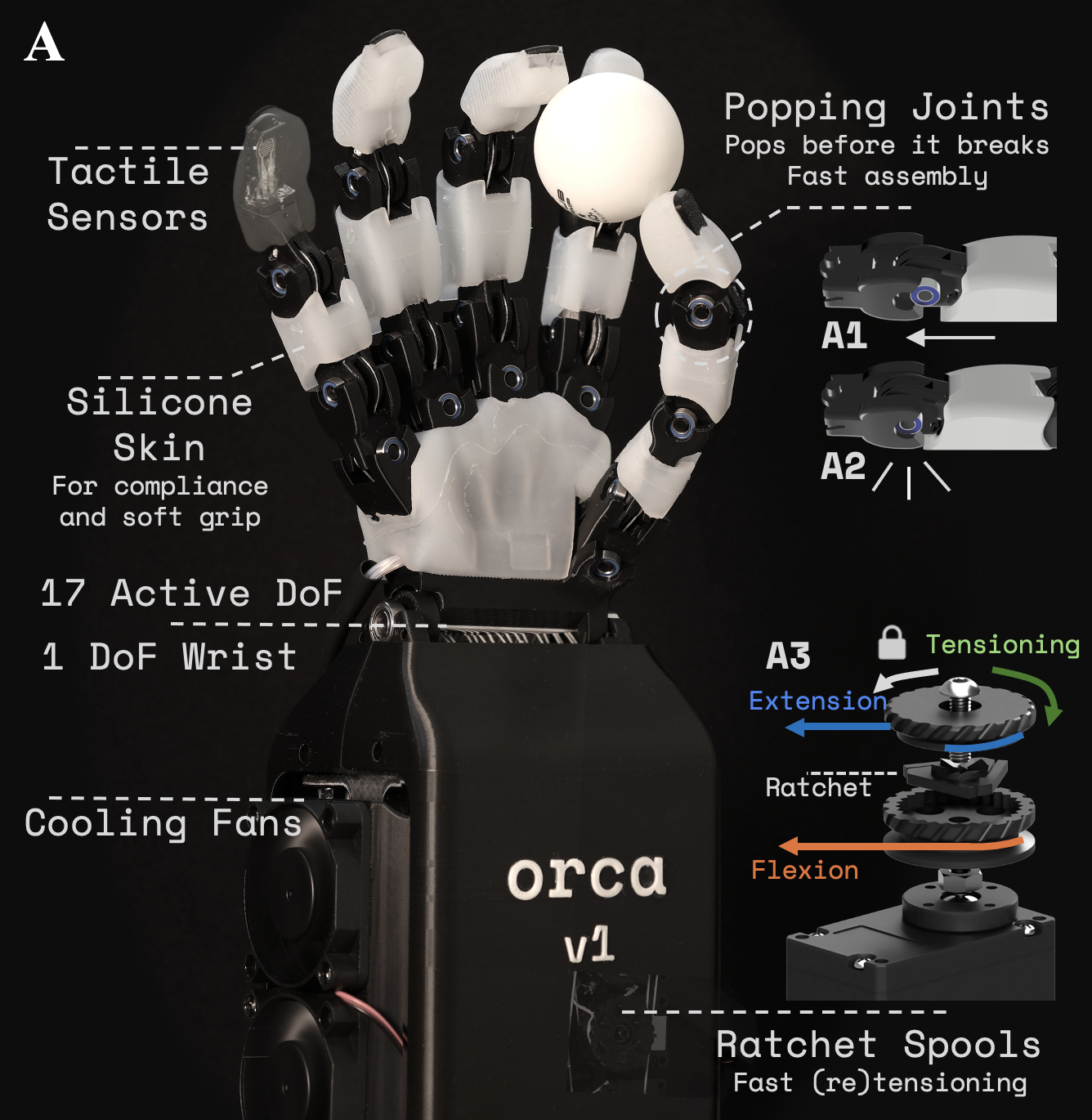
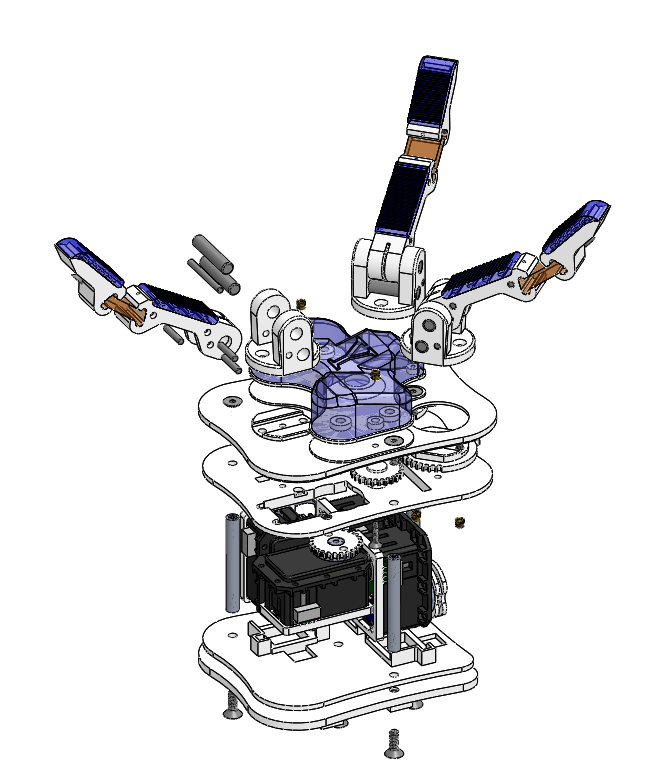
Orca Hand
Developed by: ETH Zurich
A modular and powerful open-source robotic hand for dexterous manipulation, showcasing the capabilities of DYNAMIXELs.
Ruka-Hand
Developed by: New York University
An open-source, 3D-printable robotic hand designed for accessibility and research, often built with DYNAMIXEL actuators.

LeKiwi-DYNAMIXEL
Developed by: SIG Robotics team at the University of Illinois Urbana-Champaign
LeKiwi – Low-Cost Mobile Manipulator (DYNAMIXEL Edition)

GELLO
Developed by: University of California Berkeley
A General, Low-Cost, and Intuitive Teleoperation Framework for Robot Manipulators
Share Your Project!
The DYNAMIXEL community is a vibrant hub of innovation. If you have an open-source project that utilizes DYNAMIXEL actuators, we'd love to hear about it and potentially feature it here!
Your Idea, Powered by DYNAMIXEL. Let's build the future together.