
Software
Software Overview
AI Worker is a Jetson Orin–based robot platform built for real-world Physical AI research. It supports full-body motion control and enables smooth integration of both teleoperation and AI policy execution.
The platform runs on ROS 2 Jazzy and uses the ros2_control framework for real-time joint-level control. All joints are powered by DYNAMIXEL X, Y, and P series motors connected via a single RS-485 bus, using the Dynamixel SDK. Each joint can operate in either position or current control mode, managed through a unified hardware interface.
This platform is designed for:
- Collecting motion data through teleoperation
- Training reinforcement learning or imitation learning models
- Running AI-generated trajectories in real time without changing system code
It is suitable for researchers, developers, and integrators working with AI-enabled robotics.
System Architecture
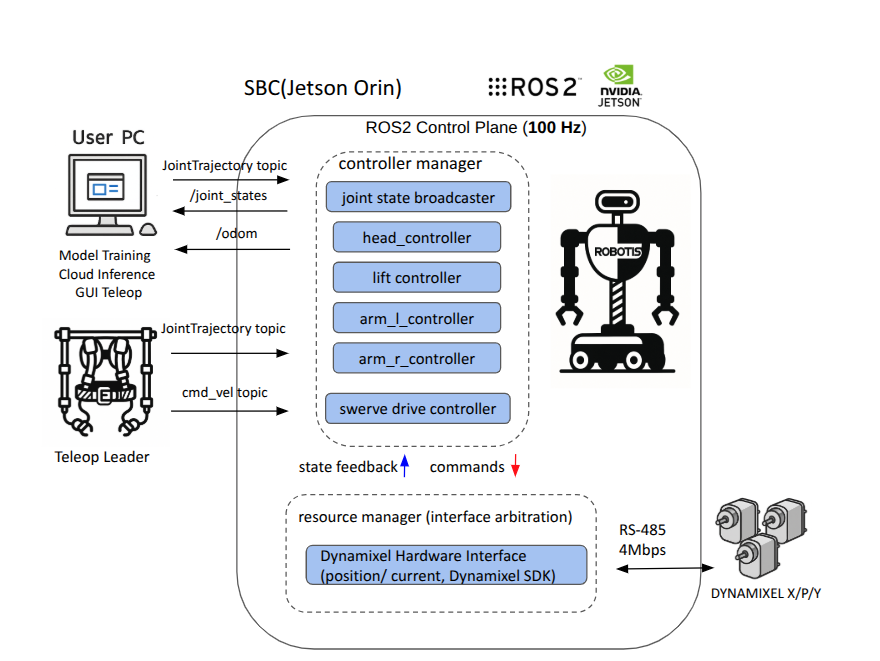
The diagram below illustrates the overall control structure of AI Worker.
External teleoperation or trajectory commands are received via ROS 2 topics, processed in real time by
ros2_control, and executed by DYNAMIXEL actuators over RS‑485.
| Layer | Component | Description |
|---|---|---|
| Compute | NVIDIA Jetson AGX Orin 32GB | Jetpack 6.2 + Docker container (ROS 2 Jazzy) |
| Motion Control | ros2_control | 100Hz joint control loop |
| Actuators | DYNAMIXEL X / P / Y series | Position / Current mode via RS‑485 |
| Communication | U2D2 (RS‑485) | 4 Mbps, Dynamixel Protocol 2.0 |
| Networking | Ethernet / Wi-Fi 6 | Remote control and AI policy streaming |
| Sensors (Optional) | Realsense D405 (wrist), ZED Mini (head) | Integrated via official ROS 2 drivers |
Why ros2_control?
ros2_control is a real-time, modular control framework used in ROS 2. AI Worker uses it without major changes.
- Separates control logic from hardware drivers
- Operates at a fixed 100Hz update rate
- Supports dynamic loading or replacement of controllers
- Allows AI policies to send trajectory commands using standard ROS topics
This structure supports both manual operation and AI-based control in the same system.
Motion Execution Pipeline
Input Source (Teleoperation / AI Policy)
↓
ROS 2 JointTrajectory Topic
↓
controller_manager (100Hz)
↓
JointTrajectoryController(s)
↓
resource_manager (interface arbitration)
↓
DynamixelHardwareInterface (position / current)
↓
RS‑485 via Dynamixel SDK
↓
DYNAMIXEL ActuatorsStep-by-Step
- Trajectory generation — Created by joystick, GUI, or AI model
- ROS topic publishing — Commands sent to
/leader/joint_trajectory_command_broadcaster_* - Controller manager — Runs the main
read → update → writeloop at 100Hz - JointTrajectoryController — Splits trajectory and commands each joint
- Resource manager — Controls access to command interfaces and prevents conflicts between controllers
- Hardware interface — Converts commands to RS-485 packets using Dynamixel SDK
- Actuators — Execute the motion and return position/current feedback
Controller Configuration & Joint Mapping
| Controller | Segment | DOF | Input Topic |
|---|---|---|---|
arm_l_controller | Left arm (w/ gripper) | 8 | /leader/joint_trajectory_command_broadcaster_left |
arm_r_controller | Right arm (w/ gripper) | 8 | /leader/joint_trajectory_command_broadcaster_right |
head_controller | Head (pan/tilt) | 2 | /leader/joystick_controller_left |
lift_controller | Vertical lift | 1 | /leader/joystick_controller_right |
joint_state_broadcaster | All joints | – | Publishes to /joint_states |
swerve_drive_controller | Mobile base | 6 | /cmd_vel |
All controllers (except joint_state_broadcaster and swerve_drive_controller) use the JointTrajectoryController type.
By default, all joints operate in position mode, except for the mobile base which operates in velocity mode.
The last joint in each arm controller corresponds to the gripper.
Controller YAML Example (link)
/**:
controller_manager:
ros__parameters:
use_sim_time: False
update_rate: 100 # Hz
arm_l_controller:
type: joint_trajectory_controller/JointTrajectoryController
arm_r_controller:
type: joint_trajectory_controller/JointTrajectoryController
head_controller:
type: joint_trajectory_controller/JointTrajectoryController
lift_controller:
type: joint_trajectory_controller/JointTrajectoryController
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
swerve_drive_controller:
type: ffw_swerve_drive_controller/SwerveDriveController
/**:
arm_l_controller:
ros__parameters:
joints:
- arm_l_joint1
- arm_l_joint2
- arm_l_joint3
- arm_l_joint4
- arm_l_joint5
- arm_l_joint6
- arm_l_joint7
- gripper_l_joint1
command_interfaces:
- position
state_interfaces:
- position
- velocity
allow_nonzero_velocity_at_trajectory_end: trueDebugging & Visualization Tools
| Tool / Topic | Description |
|---|---|
ros2 control list_controllers | List loaded controllers and their status |
/joint_states | Real-time joint position and velocity feedback |
| RViz2 | 3D view of robot model (URDF), TF, and movement |
Safety & Fault Handling
- Joint limits are enforced using the URDF and controller configuration
- Out-of-range values are clamped by the hardware interface (YAML-defined limits)
- The Dynamixel hardware interface checks for communication errors with each motor