
Dataset Preparation with LeRobot CLI
Prerequisites
Access the Robot PC either directly or via SSH, and follow the steps below. (Refer to the Setup Guide for instructions on how to connect via SSH.)
1. Launch the ROS 2 teleoperation node
Open a new terminal and enter the Docker container
cd ai_worker
./docker/container.sh enterLaunch the ROS 2 teleoperation node
ffw_bg2_ai2. Authenticate with Hugging Face
INFO
If you do not wish to use Hugging Face, you may skip this step and proceed to the next section, "Prerequisite without Hugging Face."
Open a new terminal and enter the Docker container:
cd ai_worker
./docker/container.sh enterNavigate to the lerobot directory:
cd /root/ros2_ws/src/physical_ai_tools/lerobotTo create a Hugging Face dataset, you first need to log in using a write access token, which can be generated from your Hugging Face settings:
huggingface-cli login --token ${HUGGINGFACE_TOKEN} --add-to-git-credentialStore your Hugging Face username in a variable:
export HF_USER=$(huggingface-cli whoami | head -n 1)
echo $HF_USERYou should see an output similar to the following:
YourUserNamePrerequisite without Hugging Face
If you do not intend to use the Hugging Face Hub, you can still define a placeholder username for local dataset handling:
export HF_USER=AnyNameYouWant
echo $HF_USERYou should see an output like:
AnyNameYouWantTIP
- Make sure to replace
${HF_USER}with your actual Hugging Face username.
Record your dataset
To start recording, run the following command inside the Docker container.
cd /root/ros2_ws/src/physical_ai_tools/lerobotpython lerobot/scripts/control_robot.py \
--robot.type=ffw \
--control.type=record \
--control.single_task="pick and place objects" \
--control.fps=15 \
--control.repo_id=${HF_USER}/ffw_test \
--control.tags='["tutorial"]' \
--control.warmup_time_s=5 \
--control.episode_time_s=30 \
--control.reset_time_s=10 \
--control.num_episodes=10 \
--control.push_to_hub=true \
--control.play_sounds=falseTIP
- To save the dataset locally without uploading to the Hugging Face Hub, set
--control.push_to_hub=false. This option is essential if you choose not to use Hugging Face. - If you are controlling the robot remotely via VSCode or SSH, the
arrow keysmay not work during data recording due to a pynput limitation. In this case, it's recommended to set --control.episode_time_s and --control.reset_time_s appropriately. - To use the
arrow keysfor teleoperation, connect a monitor and keyboard directly to the robot (Right arrow key: Save immediately, Left arrow key: Cancel).
👉 Key Parameters to Customize
| Parameter | Description | Example |
|---|---|---|
--control.repo_id | The Hugging Face dataset repository ID in the format <username>/<dataset_name> | username/ffw_pick_place |
--control.single_task | The name of the task you are performing | "pick and place objects" |
--control.fps | Frame rate for dataset recording | 15 (recommended) |
--control.episode_time_s | Duration (in seconds) to record each episode | 30-60 for simple tasks |
--control.reset_time_s | Time allocated (in seconds) for resetting between episodes | 10-20 seconds |
--control.num_episodes | Total number of episodes to record | 10-50 depending on task complexity |
Of course, you can modify additional parameters as needed to fit your specific use case.
The dataset is located at:
INFO
This path refers to your host system, not inside the Docker container.
~/ai_worker/docker/huggingface/lerobotDataset Visualization
Once data collection is complete, you can preview and inspect your recorded dataset using the following command:
cd /root/ros2_ws/src/physical_ai_tools/lerobotpython lerobot/scripts/visualize_dataset_html.py \
--host 0.0.0.0 \
--port 9091 \
--repo-id ${HF_USER}/ffw_testYou should see an output similar to the following:
Fetching 4 files: 100%|██████████| 4/4 [00:00<00:00, 3457.79it/s]
.gitattributes: 100%|██████████| 2.46k/2.46k [00:00<00:00, 45.9MB/s]
Fetching 126 files: 100%|██████████| 126/126 [00:00<00:00, 266.66it/s]
Resolving data files: 100%|██████████| 30/30 [00:00<00:00, 662258.53it/s]
INFO 2025-05-15 16:18:07 set_html.py:364 Output directory already exists. Loading from it: '/tmp/lerobot_visualize_dataset_uo6ddbb1'
* Serving Flask app 'visualize_dataset_html'
* Debug mode: off
INFO 2025-05-15 16:18:07 _internal.py:97 WARNING: This is a development server. Do not use it in a production deployment. Use a production WSGI server instead.
* Running on http://127.0.0.1:9091
INFO 2025-05-15 16:18:07 _internal.py:97 Press CTRL+C to quitAccess http://127.0.0.1:9091 to view the dataset. You should see a web interface similar to the one below: 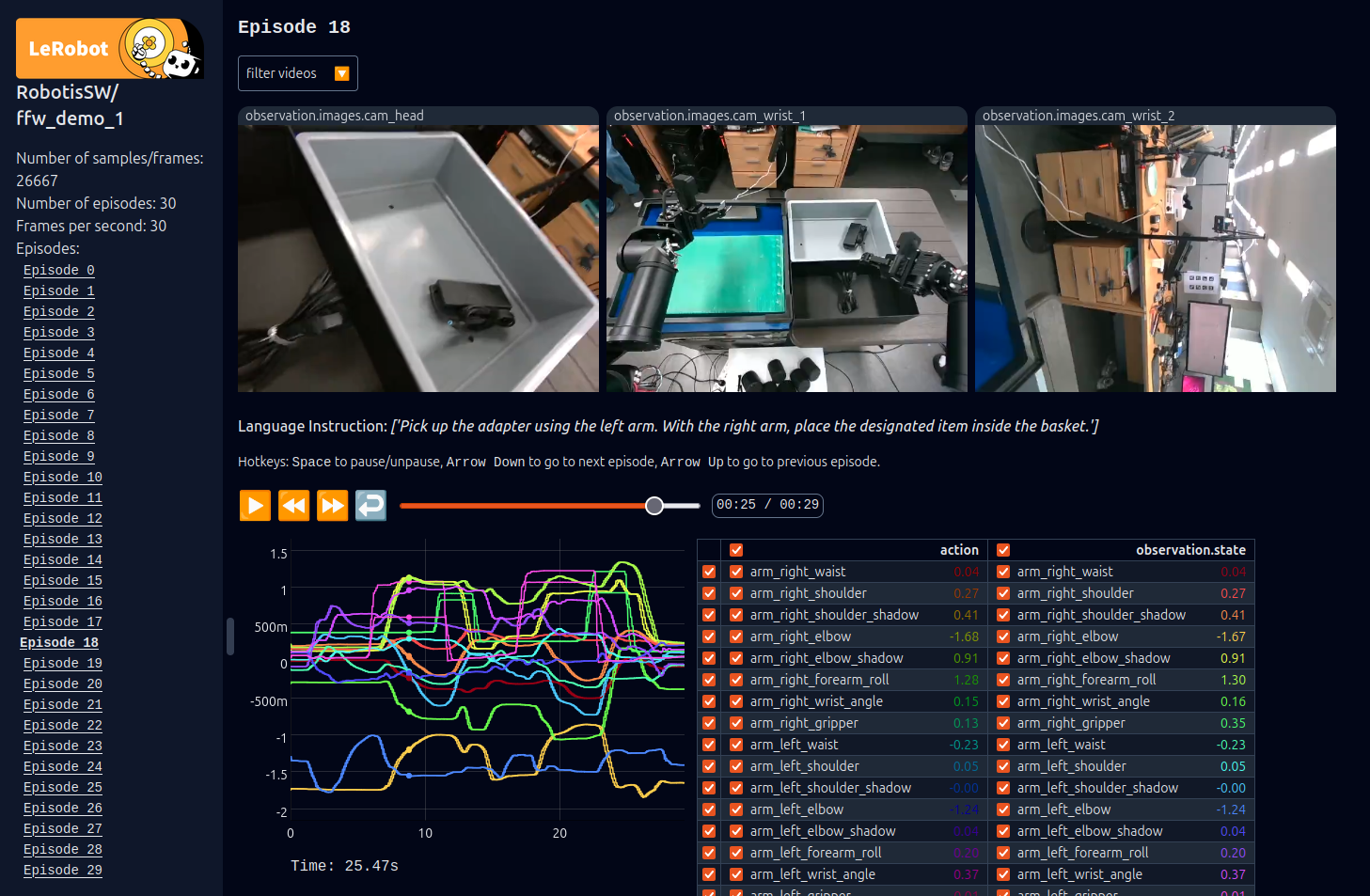
TIP
Once the server is running, open http://127.0.0.1:9091 in your browser to preview the dataset.
TIP
If you have a another device connected to the same network as the host machine, open http://ffw-{serial number}.local:9091 in your browser to preview the dataset.
For example, http://ffw-SNPR48A0000.local:9091.