
Teleoperation Guide
This guide explains how to set up and operate the AI Worker using teleoperation.
Prerequisites
Before starting teleoperation, make sure:
- The follower(AI Worker) is properly set up and powered on
Steps for Teleoperation Setup (Leader)
(*The term Leader refers to the control device in the AI WORKER system) 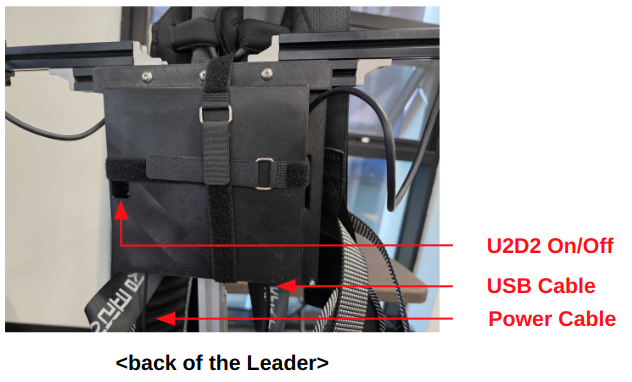
Power Cable: Connect the power adapter to supply power to the U2D2 device.U2D2 ON/OFF: This switch is located inside a small recessed hole. The device is turned on when the inner white-dotted button is pressed.USB Cable: Connect a USB cable from the U2D2 to one of the USB ports on the back of theFollower.
How to wear the Leader

- Put both arms through the
Leader'sshoulder straps. - Fasten the chest belt buckle and
hip belt buckle. - Adjust the length of the
shoulder straps,chest belt, andhip beltso that theLeaderis securely fixed on your back.
Running Teleoperation
The following teleoperation commands are executed on the robot PC. You can either connect a keyboard and mouse directly to the Nvidia Orin, or access it via SSH (see the Setup Guide for instructions).
If no containers are running when you execute docker ps -a on the robot PC, start the container using:
cd ai_worker./docker/container.sh startIf a container is already running, enter the ai_worker Docker container with:
./docker/container.sh enterOption 1: All-in-One Launch
⚠️While the command is entered in the terminal, the teleoperator should begin in a standing position with both arms lowered.
To start both the Leader and Follower(BG2/SG2) simultaneously:
- FFW_BG2
ros2 launch ffw_bringup ffw_bg2_ai.launch.pyor use the shortcut command:
ffw_bg2_ai- FFW_SG2
ros2 launch ffw_bringup ffw_sg2_ai.launch.pyor use the shortcut command:
ffw_sg2_aiOption 2: Separate Launches
If you want to run the Leader and Follower separately in different terminals:
Launch the teleoperation
Leader:bashros2 launch ffw_bringup ffw_lg2_leader_ai.launch.pyor use the shortcut:
bashffw_lg2_leader_aiLaunch the teleoperation
Follower:
FFW_BG2
bashros2 launch ffw_bringup ffw_bg2_follower_ai.launch.pyor use the shortcut:
bashffw_bg2_follower_aiFFW_SG2
bashros2 launch ffw_bringup ffw_sg2_follower_ai.launch.pyor use the shortcut:
bashffw_sg2_follower_ai
If you want to run the system without launching the cameras, you can set the launch_cameras parameter to false:
ros2 launch ffw_bringup ffw_bg2_follower_ai.launch.py launch_cameras:=falseBasic Operation
- FFW_BG2
- Once both systems are running, the
Followerwill begin to mirror your movements. - Start with slow, gentle movements to get familiar with the response.
- The grip buttons on the
Leadercontrol the gripper actions on theFollower. - The
right joystickcontrols the up and down motion of thelift, while theleft joystickcontrols theheadsection of the robot.
- FFW_SG2
- Once both systems are running, the
Followerwill begin to mirror your movements. - Start with slow, gentle movements to get familiar with the response.
- The grip buttons on the
Leadercontrol the gripper actions on theFollower. - The
right joystickcontrols the up and down motion of thelift, while theleft joystickcontrols theheadsection of the robot. - Pressing both switches simultaneously switches to
SWERVE DRIVE MODE. - In
SWERVE DRIVE MODE, the left joystick controls: X-axis: Linear x, Y-axis: Linear y The right joystick controls: Y-axis: Angular z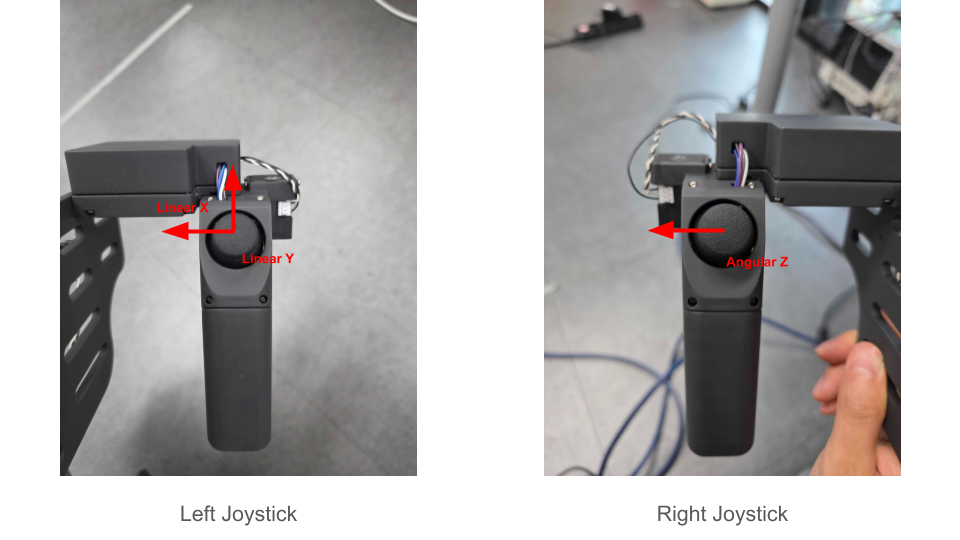
Warning: In swerve mode, the arms continue to move. Please be careful.
Stopping Teleoperation
To stop the teleoperation:
- Return to a neutral position
- Press Ctrl+C in the terminal running the launch file
Troubleshooting
- Delayed movements: Check for any obstructions or if you're reaching joint limits
- Unresponsive gripper: Ensure proper calibration and connection
- System unresponsive: Check ROS topic connections with
ros2 topic listandros2 topic echo