
OMY
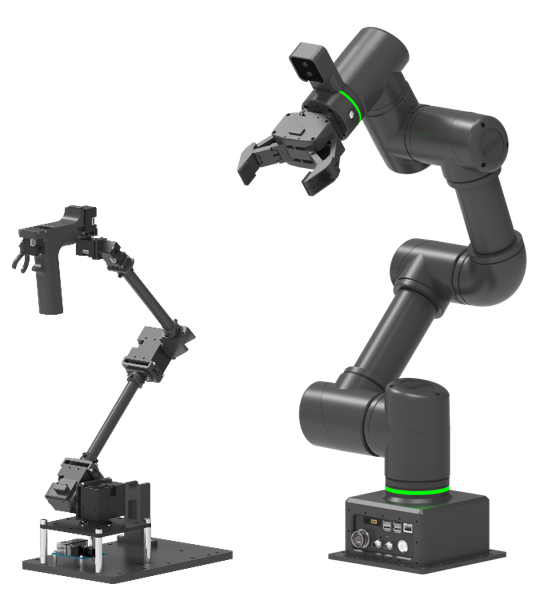
The OMY hardware platform is a teleoperation system specifically designed for imitation learning applications. It consists of two main components: the OMY-F3M follower robot arm and the OMY-L100 leader device. The follower robot features a 6-DOF robot arm with high-precision DYNAMIXEL-Y actuators, capable of handling payloads up to 3kg with sub-millimeter repeatability. The leader device provides intuitive 6-DOF control through a lightweight, ergonomic design that translates human hand movements into precise robot commands. This leader-follower system enables human operators to demonstrate complex manipulation tasks that can be learned and replicated by AI systems, with real-time communication via Ethernet and high-resolution joint control for accurate data collection.
Included Common Items
| Item | Qty |
|---|---|
| OMY-L100 | 1 |
| OMY-F3M | 1 |
| USB Hub 3.0 | 1 |
| USB cable | 1 |
| SMPS for OMY-F3M | 1 |
| SMPS for OMY-L100 | 1 |
| E stop | 1 |
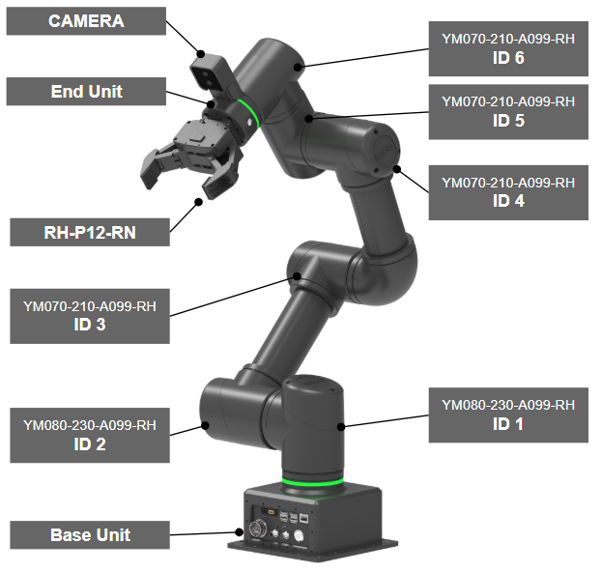
[Follower] Hardware Overview
| Item | OMY-F3M |
|---|---|
| DOF | 6 |
| Payload | 3 [kg] |
| Reach | 580 [mm] |
| Weight | 13.5 [kg] |
| Operating Voltage | 24 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -262,144 ~ 262,144[pulse/rev] |
| Joint Range | Joint 1, 2 : ±360° Joint 3 : ±150° Joint 4, 5, 6 : ±360° |
| DYNAMIXEL-Y Specification | Joint 1,2 : YM080-230-A099-RH Joint 3,4,5,6 : YM070-210-A099-RH |
| Repeatability | ±0.05 [mm] |
| Brake Force | 200% of the continuous torque for each joint |
| TCP Speed | < 900 [mm/s] |
| Host Interface | Ethernet |
| Internal Communications | RS485 |
| Communication Baudrate | 4 [Mbps] |
| Robot Hand | RH-P12-RN |
| Camera | Intel RealSense D405 |
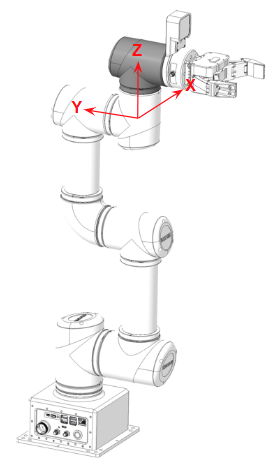
[Follower] Layout
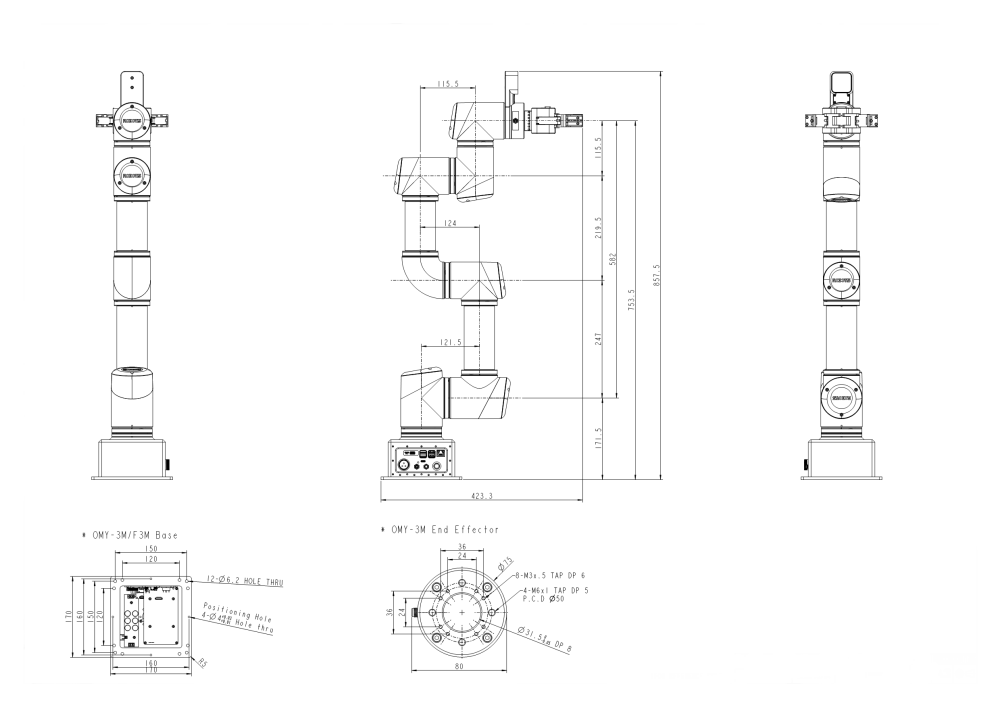
Drawing Files
| File Type | Download Link |
|---|---|
| 📄 Download PDF | |
| DWG | 💾 Download DWG |
| STEP | 📦 Download STEP |
[Follower] Workspace
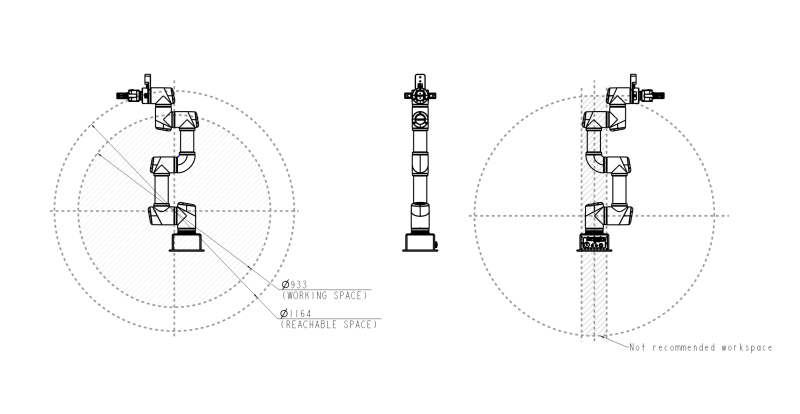
Drawing File
| File Type | Download Link |
|---|---|
| 📄 Download PDF |
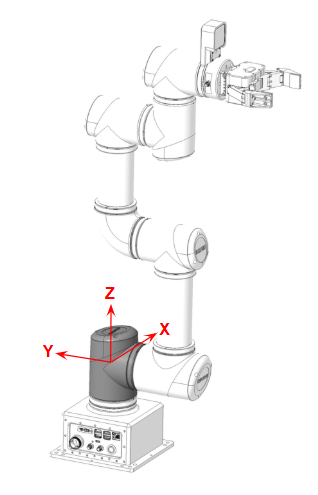
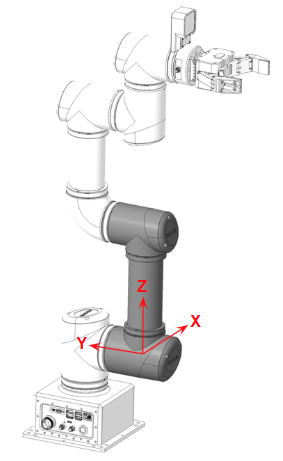
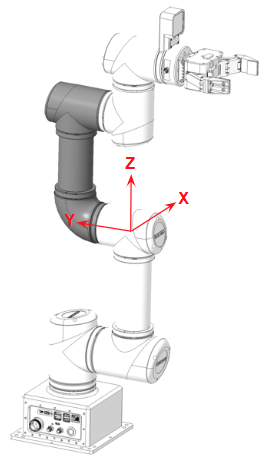
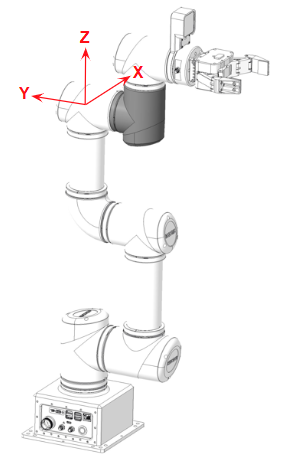
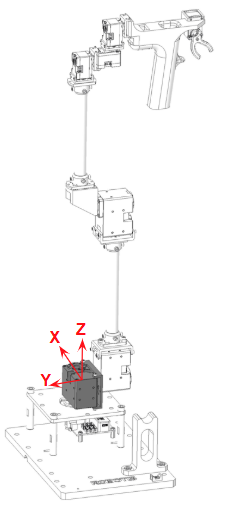
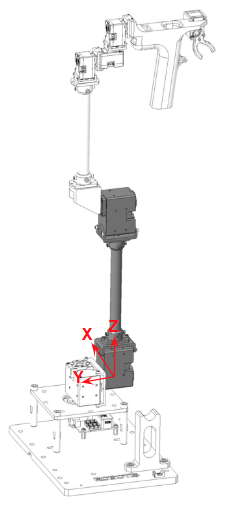
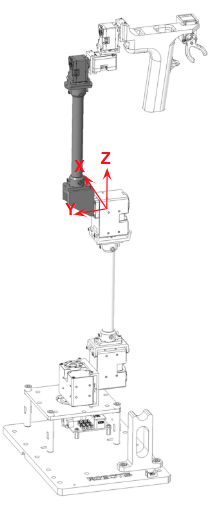
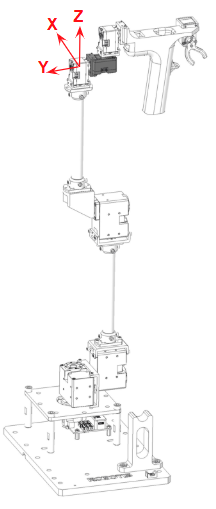
[Follower] Inertia
| Joint | Mass [g] | COG X [mm] | COG Y [mm] | COG Z [mm] | Ixx @ COG [g·mm²] | Iyy @ COG [g·mm²] | Izz @ COG [g·mm²] |
|---|---|---|---|---|---|---|---|
| 1 | 2.0648832e+03 | -1.1063615e-01 | -5.4711270e+00 | -1.5897733e+01 | 3.0332190e+06 | 2.7276724e+06 | 2.2826576e+06 |
| 2 | 3.6795395e+03 | 1.1405379e-02 | 1.6184244e+01 | 1.0360634e+02 | 5.1731918e+07 | 5.0353401e+07 | 4.5014360e+06 |
| 3 | 2.3865916e+03 | 7.8148689e-02 | 1.0718481e+02 | 1.4117267e+02 | 2.2694399e+07 | 2.1920087e+07 | 2.7761559e+06 |
| 4 | 1.4002347e+03 | -1.3318256e-01 | -1.0746667e+02 | 1.9090688e+01 | 1.7545679e+06 | 1.5652147e+06 | 1.2159839e+06 |
| 5 | 1.4002347e+03 | 1.3318256e-01 | -1.9090688e+01 | 1.0996667e+02 | 1.7545679e+06 | 1.2159839e+06 | 1.5652147e+06 |
| 6 | 4.0015475e+02 | 1.1080146e-02 | -8.0594056e+01 | 9.3029337e+00 | 5.6741276e+05 | 6.2966706e+05 | 1.9890515e+05 |
Raw inertia data (full)
Joint 1
- Volume [mm3] : 5.4693773e+05
- Surface Area [mm2] : 4.2183171e+05
- Average Density [gram / mm3] : 3.7753533e-03
- Mass [gram] : 2.0648832e+03
- Center of Gravity [mm]
- X : -1.1063615e-01
- Y : -5.4711270e+00
- Z : -1.5897733e+01
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 3.6169019e+06 3.9294009e+03 -2.9605259e+02
- Iyx Iyy Iyz : 3.9294009e+03 3.2495719e+06 -2.5094206e+02
- Izx Izy Izz : -2.9605259e+02 -2.5094206e+02 2.3444915e+06
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 3.0332190e+06 5.1792838e+03 3.3357961e+03
- Iyx Iyy Iyz : 5.1792838e+03 2.7276724e+06 1.7934953e+05
- Izx Izy Izz : 3.3357961e+03 1.7934953e+05 2.2826576e+06
Joint 2
- Volume [mm3] : 1.0121887e+06
- Surface Area [mm2] : 7.9478493e+05
- Average Density [gram / mm3] : 3.6352307e-03
- Mass [gram] : 3.6795395e+03
- Center of Gravity [mm]
- X : 1.1405379e-02
- Y : 1.6184244e+01
- Z : 1.0360634e+02
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 9.2192879e+07 1.7166852e+03 5.3545961e+04
- Iyx Iyy Iyz : 1.7166852e+03 8.9850582e+07 -6.6080728e+06
- Izx Izy Izz : 5.3545961e+04 -6.6080728e+06 5.4652173e+06
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 5.1731918e+07 2.3958819e+03 5.7893960e+04
- Iyx Iyy Iyz : 2.3958819e+03 5.0353401e+07 -4.3825716e+05
- Izx Izy Izz : 5.7893960e+04 -4.3825716e+05 4.5014360e+06
Joint 3
- Volume [mm3] : 7.4781397e+05
- Surface Area [mm2] : 4.6677064e+05
- Average Density [gram / mm3] : 3.1914242e-03
- Mass [gram] : 2.3865916e+03
- Center of Gravity [mm]
- X : 7.8148689e-02
- Y : 1.0718481e+02
- Z : 1.4117267e+02
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 9.7677063e+07 -2.0932356e+04 -4.4881731e+04
- Iyx Iyy Iyz : -2.0932356e+04 6.9484210e+07 -3.5921073e+07
- Izx Izy Izz : -4.4881731e+04 -3.5921073e+07 3.0194727e+07
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 2.2694399e+07 -9.4142428e+02 -1.8551757e+04
- Iyx Iyy Iyz : -9.4142428e+02 2.1920087e+07 1.9179387e+05
- Izx Izy Izz : -1.8551757e+04 1.9179387e+05 2.7761559e+06
Joint 4
- Volume [mm3] : 3.8584923e+05
- Surface Area [mm2] : 3.3453626e+05
- Average Density [gram / mm3] : 3.6289686e-03
- Mass [gram] : 1.4002347e+03
- Center of Gravity [mm]
- X : -1.3318256e-01
- Y : -1.0746667e+02
- Z : 1.9090688e+01
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 1.8436318e+07 -2.4627457e+04 1.7842481e+03
- Iyx Iyy Iyz : -2.4627457e+04 2.0755613e+06 3.0261384e+06
- Izx Izy Izz : 1.7842481e+03 3.0261384e+06 1.7387437e+07
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 1.7545679e+06 -4.5863379e+03 -1.7759142e+03
- Iyx Iyy Iyz : -4.5863379e+03 1.5652147e+06 1.5339913e+05
- Izx Izy Izz : -1.7759142e+03 1.5339913e+05 1.2159839e+06
Joint 5
- Volume [mm3] : 3.8584923e+05
- Surface Area [mm2] : 3.3453626e+05
- Average Density [gram / mm3] : 3.6289686e-03
- Mass [gram] : 1.4002347e+03
- Center of Gravity [mm]
- X : 1.3318256e-01
- Y : -1.9090688e+01
- Z : 1.0996667e+02
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 1.9197463e+07 1.7842481e+03 -2.5093675e+04
- Iyx Iyy Iyz : 1.7842481e+03 1.8148582e+07 3.0929670e+06
- Izx Izy Izz : -2.5093675e+04 3.0929670e+06 2.0755613e+06
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 1.7545679e+06 -1.7759143e+03 -4.5863376e+03
- Iyx Iyy Iyz : -1.7759143e+03 1.2159839e+06 1.5339913e+05
- Izx Izy Izz : -4.5863376e+03 1.5339913e+05 1.5652147e+06
Joint 6
- Volume [mm3] : 1.3218403e+05
- Surface Area [mm2] : 7.4349772e+04
- Average Density [gram / mm3] : 3.0272548e-03
- Mass [gram] : 4.0015475e+02
- Center of Gravity [mm]
- X : 1.1080146e-02
- Y : -8.0594056e+01
- Z : 9.3029337e+00
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 3.2012099e+06 5.5806913e+02 -1.2757818e+03
- Iyx Iyy Iyz : 5.5806913e+02 6.6429834e+05 2.4370168e+05
- Izx Izy Izz : -1.2757818e+03 2.4370168e+05 2.7980711e+06
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 5.6741276e+05 2.0073339e+02 -1.2345347e+03
- Iyx Iyy Iyz : 2.0073339e+02 6.2966706e+05 -5.6318805e+04
- Izx Izy Izz : -1.2345347e+03 -5.6318805e+04 1.9890515e+05
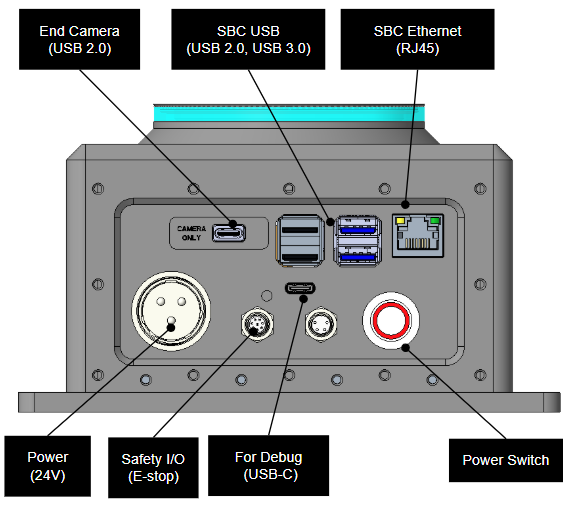
[Follower] Base Unit
Back Panel
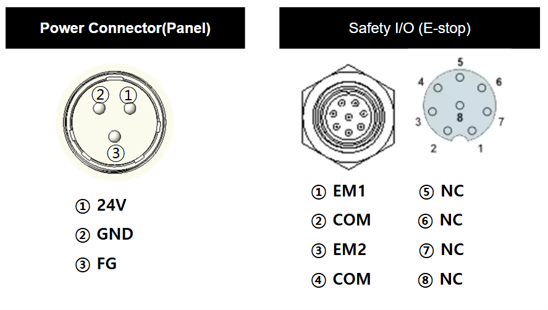
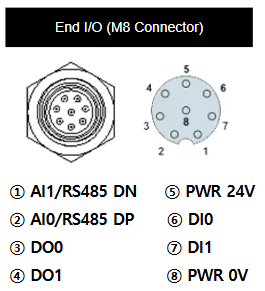
Pin Assignment
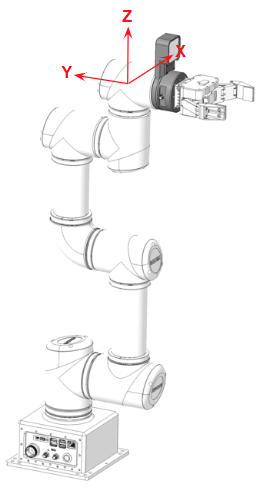
[Follower] End Unit
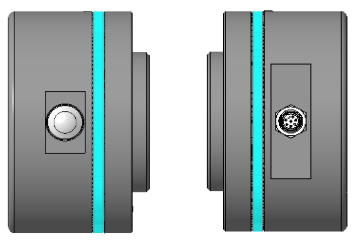
End Tool Support Specifications
| Item | Specification |
|---|---|
| Power Output | 24V / 1A |
| Interface | RS485, Max 4 Mbps |
| Protocol | Dynamixel Protocol 2.0, Modbus-RTU(Only 30001~39999, 40001 ~ 49999) |
| Connector | M8 8pin |
Pin Assignment
[Leader] Hardware Overview
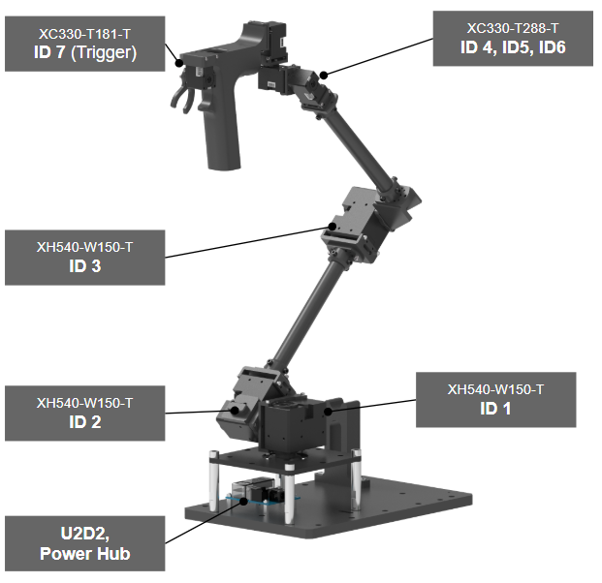
| Item | OMY-L100 |
|---|---|
| DOF | 6 |
| Reach | 560 [mm] |
| Weight | 1.46 [kg] |
| Operating Voltage | 12 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] |
| Joint Range | Joint 1 : ±180° Joint 2 : -70° ~ +100° Joint 3, 4, 5, 6 : ±180° Joint 7 : -90° ~ +60° |
| DYNAMIXEL-Y Specification | Joint 1, 2, 3 : XH540-W150 Joint 4,5,6 : XC330-T288 Joint 7 : XC330-T181 |
| Host Interface | U2D2 (USB 2.0) |
| Internal Communications | TTL Multidrop Bus |
| Communication Baudrate | 4 [Mbps] |
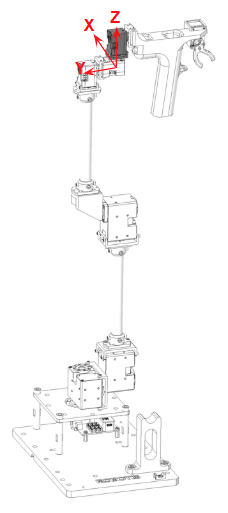
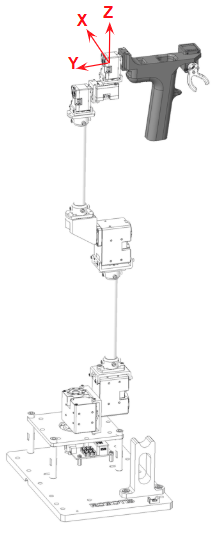
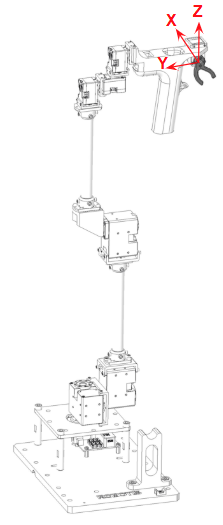
[Leader] Layout
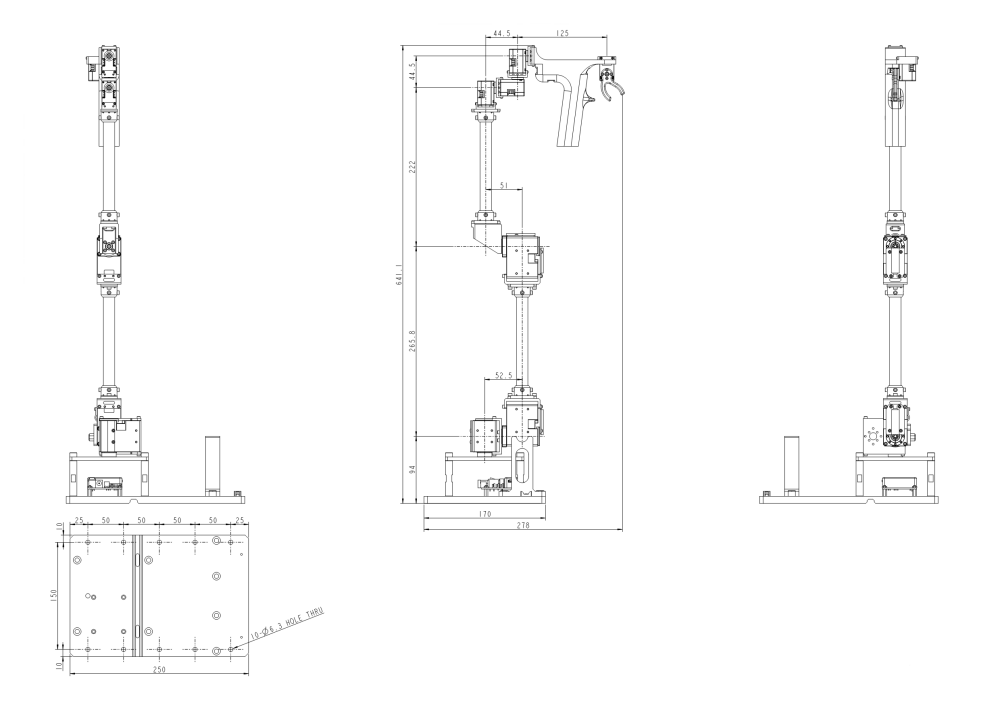
Drawing Files
| File Type | Download Link |
|---|---|
| 📄 Download PDF | |
| DWG | 💾 Download DWG |
| STEP | 📦 Download STEP |
[Leader] Inertia
| Joint | Mass [g] | COG X [mm] | COG Y [mm] | COG Z [mm] | Ixx @ COG [g·mm²] | Iyy @ COG [g·mm²] | Izz @ COG [g·mm²] |
|---|---|---|---|---|---|---|---|
| 1 | 1.9792620e+02 | -1.5094777e+01 | -2.9152531e+00 | -5.8029327e-01 | 6.2365226e+04 | 9.4342296e+04 | 8.3389570e+04 |
| 2 | 4.9547242e+02 | -6.6509235e-02 | 2.2442703e+00 | 1.3349620e+02 | 6.3981681e+06 | 6.3363675e+06 | 1.4701194e+05 |
| 3 | 9.8660130e+01 | -1.7428771e-01 | 4.9723865e+01 | 1.2400449e+02 | 6.4610911e+05 | 6.4271022e+05 | 1.2915160e+04 |
| 4 | 2.6687200e+01 | 2.6921263e-02 | -3.5455461e+01 | 7.5765923e-01 | 4.9440199e+03 | 2.2567035e+03 | 4.4783555e+03 |
| 5 | 2.6687200e+01 | -2.6921263e-02 | -7.5765923e-01 | 3.3955461e+01 | 4.9440199e+03 | 4.4783555e+03 | 2.2567035e+03 |
| 6 | 1.0912699e+02 | 3.7567212e+00 | -7.7299588e+01 | -3.2079617e+01 | 2.4565166e+05 | 1.2581152e+05 | 1.4593436e+05 |
| 7 | 4.0609159e+00 | -2.6354677e-01 | -2.0547867e+00 | -8.7853268e+00 | 7.5093441e+02 | 5.4840080e+02 | 2.3962266e+02 |
Raw inertia data (full)
Joint 1
- Volume [mm3] : 9.5973690e+04
- Surface Area [mm2] : 2.5170342e+04
- Average Density [gram / mm3] : 2.0622965e-03
- Mass [gram] : 1.9792620e+02
- Center of Gravity [mm]
- X : -1.5094777e+01
- Y : -2.9152531e+00
- Z : -5.8029327e-01
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 6.4113991e+04 -8.9435794e+03 -1.3920652e+03
- Iyx Iyy Iyz : -8.9435794e+03 1.3950688e+05 0.0000000e+00
- Izx Izy Izz : -1.3920652e+03 0.0000000e+00 1.3016962e+05
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 6.2365226e+04 -2.3381798e+02 3.4164910e+02
- Iyx Iyy Iyz : -2.3381798e+02 9.4342296e+04 3.3483623e+02
- Izx Izy Izz : 3.4164910e+02 3.3483623e+02 8.3389570e+04
Joint 2
- Volume [mm3] : 2.2205845e+05
- Surface Area [mm2] : 9.1886481e+04
- Average Density [gram / mm3] : 2.2312703e-03
- Mass [gram] : 4.9547242e+02
- Center of Gravity [mm]
- X : -6.6509235e-02
- Y : 2.2442703e+00
- Z : 1.3349620e+02
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 1.5230595e+07 0.0000000e+00 4.3795721e+03
- Iyx Iyy Iyz : 0.0000000e+00 1.5166301e+07 -1.4835620e+05
- Izx Izy Izz : 4.3795721e+03 -1.4835620e+05 1.4950970e+05
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 6.3981681e+06 -7.3954672e+01 -1.9593893e+01
- Iyx Iyy Iyz : -7.3954672e+01 6.3363675e+06 8.8108892e+01
- Izx Izy Izz : -1.9593893e+01 8.8108892e+01 1.4701194e+05
Joint 3
- Volume [mm3] : 5.0288334e+04
- Surface Area [mm2] : 4.6160100e+04
- Average Density [gram / mm3] : 1.9618890e-03
- Mass [gram] : 9.8660130e+01
- Center of Gravity [mm]
- X : -1.7428771e-01
- Y : 4.9723865e+01
- Z : 1.2400449e+02
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 2.4071507e+06 8.7775916e+02 3.1148177e+03
- Iyx Iyy Iyz : 8.7775916e+02 2.1598213e+06 -6.1856126e+05
- Izx Izy Izz : 3.1148177e+03 -6.1856126e+05 2.5685165e+05
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 6.4610911e+05 2.2744961e+01 9.8252974e+02
- Iyx Iyy Iyz : 2.2744961e+01 6.4271022e+05 -1.0224619e+04
- Izx Izy Izz : 9.8252974e+02 -1.0224619e+04 1.2915160e+04
Joint 4
- Volume [mm3] : 1.7190589e+04
- Surface Area [mm2] : 1.2425496e+04
- Average Density [gram / mm3] : 1.5524308e-03
- Mass [gram] : 2.6687200e+01
- Center of Gravity [mm]
- X : 2.6921263e-02
- Y : -3.5455461e+01
- Z : 7.5765923e-01
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 3.8507544e+04 2.2553057e+01 7.9952527e-01
- Iyx Iyy Iyz : 2.2553057e+01 2.2720426e+03 8.6573139e+02
- Izx Izy Izz : 7.9952527e-01 8.6573139e+02 3.8026579e+04
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 4.9440199e+03 -2.9200298e+00 1.3438679e+00
- Iyx Iyy Iyz : -2.9200298e+00 2.2567035e+03 1.4882894e+02
- Izx Izy Izz : 1.3438679e+00 1.4882894e+02 4.4783555e+03
Joint 5
- Volume [mm3] : 1.7190589e+04
- Surface Area [mm2] : 1.2425496e+04
- Average Density [gram / mm3] : 1.5524308e-03
- Mass [gram] : 2.6687200e+01
- Center of Gravity [mm]
- X : -2.6921263e-02
- Y : -7.5765923e-01
- Z : 3.3955461e+01
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 3.5728969e+04 7.9952527e-01 2.1475377e+01
- Iyx Iyy Iyz : 7.9952527e-01 3.5248004e+04 8.3540169e+02
- Izx Izy Izz : 2.1475377e+01 8.3540169e+02 2.2720426e+03
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 4.9440199e+03 1.3438679e+00 -2.9200298e+00
- Iyx Iyy Iyz : 1.3438679e+00 4.4783555e+03 1.4882894e+02
- Izx Izy Izz : -2.9200298e+00 1.4882894e+02 2.2567035e+03
Joint 6
- Volume [mm3] : 9.4664842e+04
- Surface Area [mm2] : 4.7828529e+04
- Average Density [gram / mm3] : 1.1527721e-03
- Mass [gram] : 1.0912699e+02
- Center of Gravity [mm]
- X : 3.7567212e+00
- Y : -7.7299588e+01
- Z : -3.2079617e+01
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 1.0100129e+06 5.1256685e+04 6.7434085e+03
- Iyx Iyy Iyz : 5.1256685e+04 2.3965441e+05 -2.7229780e+05
- Izx Izy Izz : 6.7434085e+03 -2.7229780e+05 7.9953292e+05
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 2.4565166e+05 1.9566971e+04 -6.4079407e+03
- Iyx Iyy Iyz : 1.9566971e+04 1.2581152e+05 -1.6911154e+03
- Izx Izy Izz : -6.4079407e+03 -1.6911154e+03 1.4593436e+05
Joint 7
- Volume [mm3] : 2.6850137e+03
- Surface Area [mm2] : 2.3221225e+03
- Average Density [gram / mm3] : 1.5124377e-03
- Mass [gram] : 4.0609159e+00
- Center of Gravity [mm]
- X : -2.6354677e-01
- Y : -2.0547867e+00
- Z : -8.7853268e+00
- Inertia Tensor with respect to C1 coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 1.0815097e+03 0.0000000e+00 0.0000000e+00
- Iyx Iyy Iyz : 0.0000000e+00 8.6211234e+02 -1.7273536e+02
- Izx Izy Izz : 0.0000000e+00 -1.7273536e+02 2.5705050e+02
- Inertia Tensor at CENTER OF GRAVITY with respect to coordinate frame: [gram * mm2]
- Ixx Ixy Ixz : 7.5093441e+02 2.1991129e+00 9.4024163e+00
- Iyx Iyy Iyz : 2.1991129e+00 5.4840080e+02 -9.9427818e+01
- Izx Izy Izz : 9.4024163e+00 -9.9427818e+01 2.3962266e+02