
Setup Guide — ROS 2 (Physical AI Tools)
Overview
This guide shows how to set up and operate OMX using Physical AI Tools (Web UI). Follow the steps to prepare repositories, configure Docker, and run the teleoperation node.
Software Setup
Prerequisites
Operating System: Any Linux distribution
- The container runs Ubuntu 24.04 + ROS 2 Jazzy
- The Host OS version does not need to match.
Docker Engine
Install using the official Docker guide
After installation:
bashsudo usermod -aG docker $USER sudo systemctl enable docker docker run hello-world
Git
bashsudo apt install gitNVIDIA Container Toolkit
- Follow the official installation guide
Required steps:
- Configure the production repository
- Install
nvidia-container-toolkit - Configure Docker runtime using
nvidia-ctk - Restart Docker daemon
For detailed configuration, see the Docker configuration guide
- Follow the official installation guide
Docker Volume Configuration
The Docker container uses volume mappings for hardware access, development, and data persistence:
volumes:
# Hardware and system access
- /dev:/dev
- /tmp/.X11-unix:/tmp/.X11-unix:rw
- /tmp/.docker.xauth:/tmp/.docker.xauth:rw
# Development and data directories
- ./workspace:/workspace
- ../:/root/ros2_ws/src/open_manipulator/TIP
Store your development code in /workspace to preserve your codes.
Set up Open Manipulator Docker Container
1. Start the Docker Container:
Clone the repository:
USER PC
git clone https://github.com/ROBOTIS-GIT/open_manipulatorStart the Open Manipulator container with the following command:
cd open_manipulator/docker && ./container.sh start2. Set up launch file port
Enter the Open Manipulator Docker container:
USER PC
./container.sh enterINFO
First, connect only the 'Leader' USB to the port, then check and copy the OpenRB serial ID.
USER PC or USER PC 🐋 OPEN MANIPULATOR
ls -al /dev/serial/by-id/
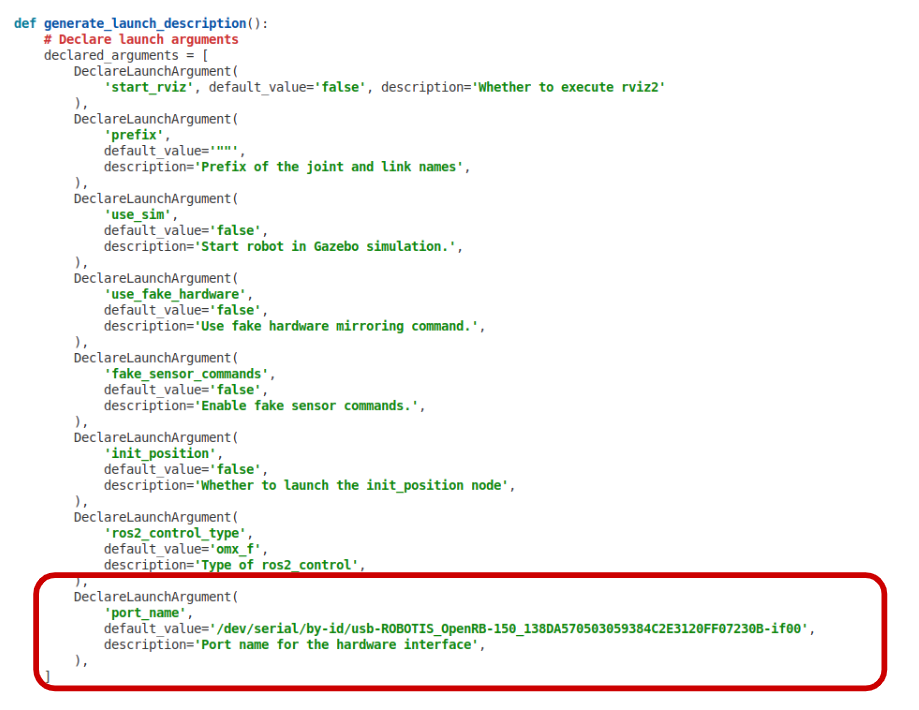
As shown in the image below, paste the serial ID you noted above into the port name parameter for the [leader] then save.
USER PC 🐋 OPEN MANIPULATOR
sudo nano ~/ros2_ws/src/open_manipulator/open_manipulator_bringup/launch/omx_l_leader_ai.launch.py# omx_l_leader_ai.launch.py
DeclareLaunchArgument(
'port_name',
default_value='/dev/serial/by-id/{your_leader_serial_id}',
description='Port name for hardware connection.',
)INFO
Second, connect only the 'Follower' USB to the port, then check and copy the OpenRB serial ID.
USER PC or USER PC 🐋 OPEN MANIPULATOR
ls -al /dev/serial/by-id/
As shown in the image below, paste the serial ID you noted above into the port name parameter for the [follower], then save.
USER PC 🐋 OPEN MANIPULATOR
sudo nano ~/ros2_ws/src/open_manipulator/open_manipulator_bringup/launch/omx_f_follower_ai.launch.py# omx_f_follower_ai.launch.py
DeclareLaunchArgument(
'port_name',
default_value='/dev/serial/by-id/{your_follower_serial_id}',
description='Port name for hardware connection.',
)INFO
Ultimately, it will be changed as shown below.
🎉 Open Manipulator Container Setup Complete!
Please exit the Docker container and return to your host terminal for the next steps.
Set up Physical AI Tools Docker Container
1. Start the Docker container
Clone the repository along with all required submodules:
USER PC
git clone --recurse-submodules https://github.com/ROBOTIS-GIT/physical_ai_tools.gitStart the Physical AI Tools Docker container with the following command:
cd physical_ai_tools/docker && ./container.sh start2. Configure camera topics
If you are using more than one camera or want to use a custom camera, list the available camera topics and choose the one you want to use:
Enter the Physical AI Tools Docker container:
USER PC
./container.sh enterlist the available topics to find your camera stream:
USER PC
ros2 topic listAnd open the configuration file and update it as described below:
USER PC 🐋 PHYSICAL AI TOOLS
sudo nano ~/ros2_ws/src/physical_ai_tools/physical_ai_server/config/omx_f_config.yamlThen update the fields outlined in red in the UI to point to your desired camera topic.
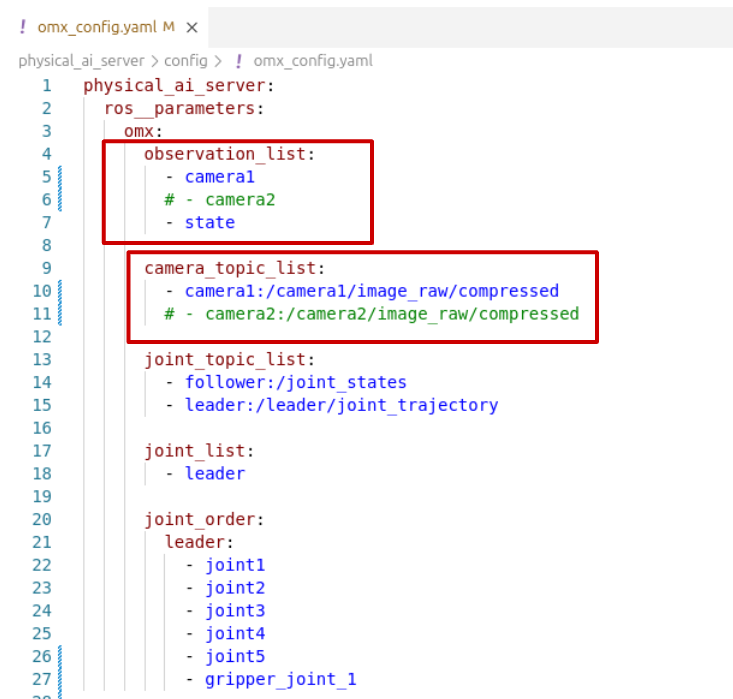
INFO
Note: The topic you set must always end with compressed
(for example, camera1/image_raw/compressed).
🎉 Physical AI Tools Container Setup Complete!
Click the button below to start Imitation Learning.