
OMX
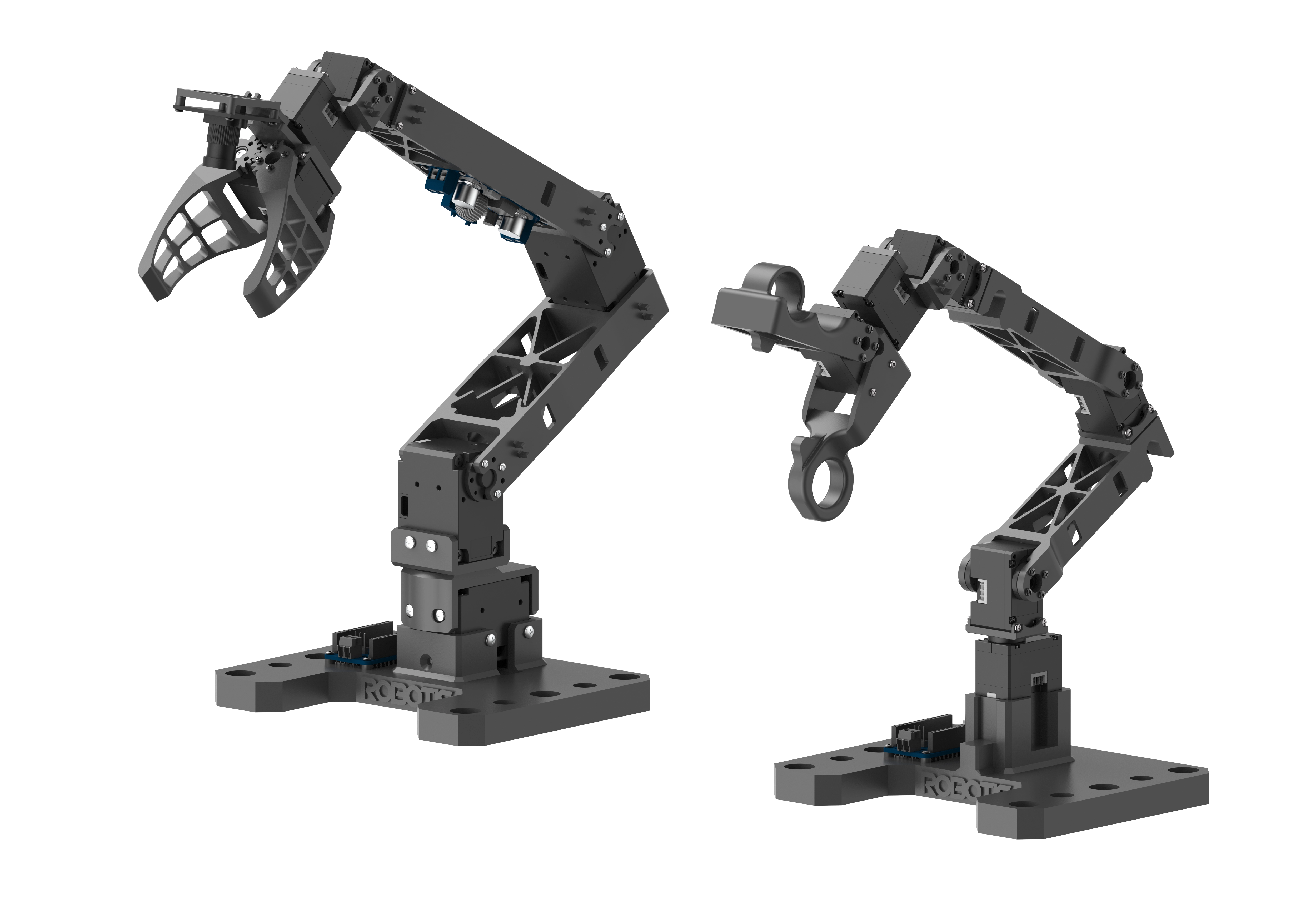
The OMX hardware platform is an entry-level Physical AI manipulator designed for imitation learning and teleoperation. It consists of two main components: the OMX-F follower robot arm and the OMX-L leader device. Built on DYNAMIXEL‑X actuators and ROS 2‑native workflows, it supports end‑to‑end IL pipelines and seamless integration with Physical AI Tools and LeRobot.
[OMX-AI] Included Common Items
| Item | Qty |
|---|---|
| OpenRB-150 | 2 |
| XL430-W250-T | 3 |
| XL330-M288-T | 8 |
| XL330-M077-T | 1 |
| SMPS2DXL | 1 |
| SMPS | 1 |
| USB-C CABLE | 2 |
| CLAMP | 4 |
| DC CONVERTER | 1 |
| 3D printed parts for OMX-F & OMX-L | — |
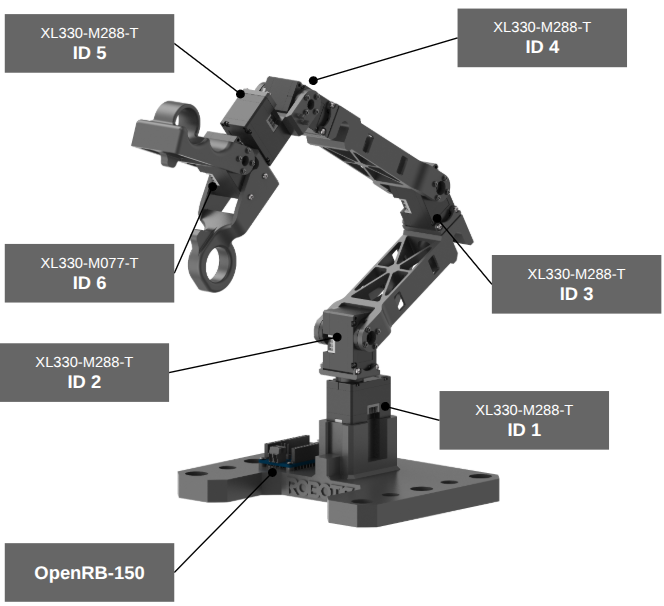
[OMX-L] Hardware Overview
| Item | OMX (Leader) |
|---|---|
| DOF | 5 + 1Gripper |
| Full Reach | 335 [mm] |
| Weight | 360 [g] |
| Operating Voltage | 5 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] |
| Joint Range | Joint 1 : -270° ~ +360° Joint 2, 3 : -120° ~ +90° Joint 4 : -100° ~ +100° Joint 5 : ±270° Joint 6 : 0° ~ + 100° |
| DYNAMIXEL-X Specification | Joint 1~5 : XL330-M288-T Joint 6 : XL330-M077-T |
| Host Interface | USB C-Type |
| Internal Communications | TTL |
| Communication Baudrate | 1 [Mbps] |
| SW | ROS 2 |
[OMX-L] Layout
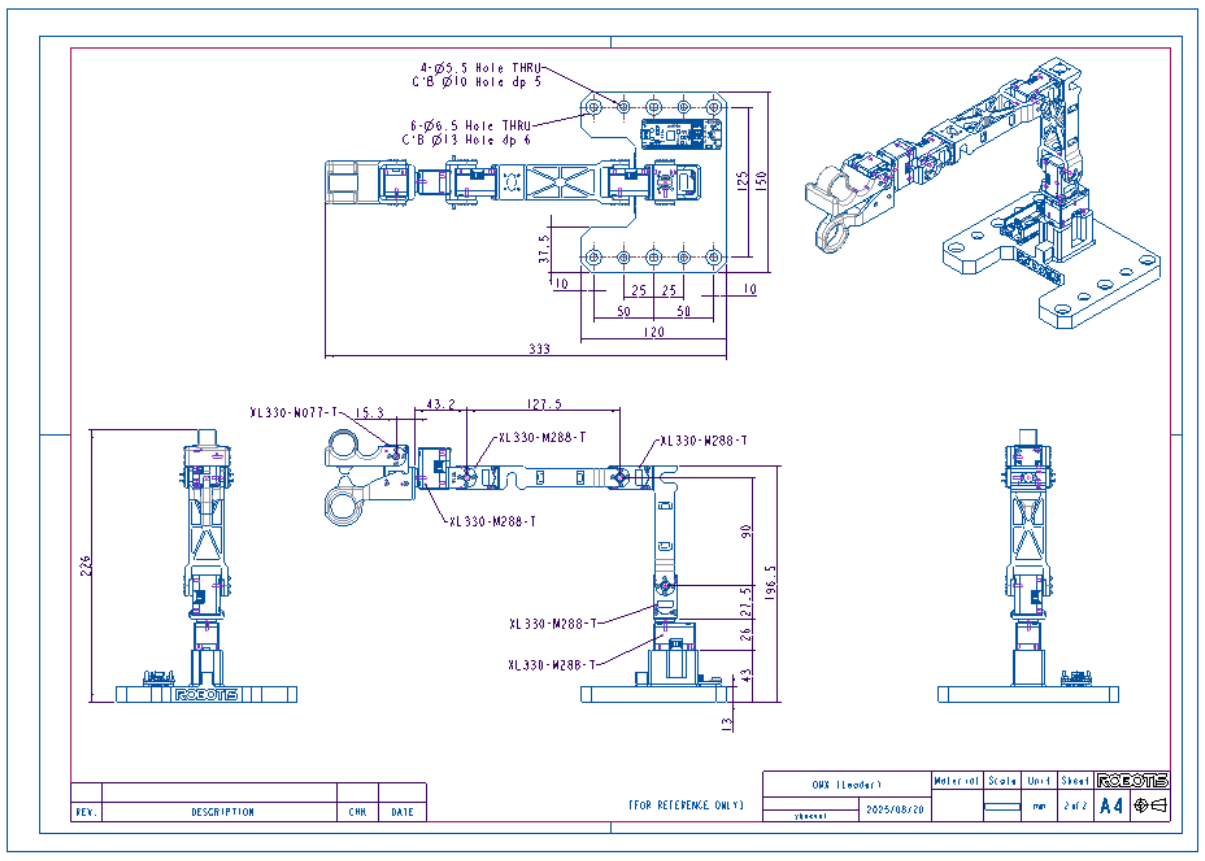
Drawing Files
| File Type | Download Link |
|---|---|
| 📄 Download PDF |
3D Printable Parts
| File Type | Download Link |
|---|---|
| STEP | 📦 Download STEP |
| STL |
[OMX-F] Hardware Overview
| Item | OMX (Follower) |
|---|---|
| DOF | 5 + 1Gripper |
| Full Reach | 400 [mm] |
| Weight | 560 [g] |
| Operating Voltage | 12 [VDC] |
| Joint Resolution | -π(rad) ~ π(rad), -2,048 ~ 2,048 [pulse/rev] |
| Joint Range | Joint 1 : -270° ~ +360° Joint 2, 3 : -120° ~ +90° Joint 4 : -100° ~ +100° Joint 5 : ±270° Joint 6 : 0° ~ + 100° |
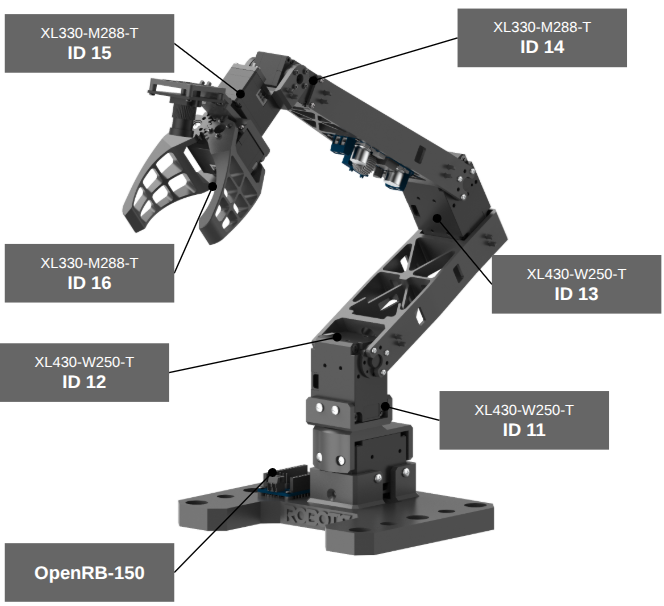
| DYNAMIXEL-X Specification | ID 11~13 : XL430-W250-T ID 14~16 : XL330-M288-T |
| Host Interface | USB C-Type |
| Internal Communications | TTL |
| Communication Baudrate | 1 [Mbps] |
| SW | ROS 2 |
| Payload | Full reach : 100g , Normal reach : 250g |
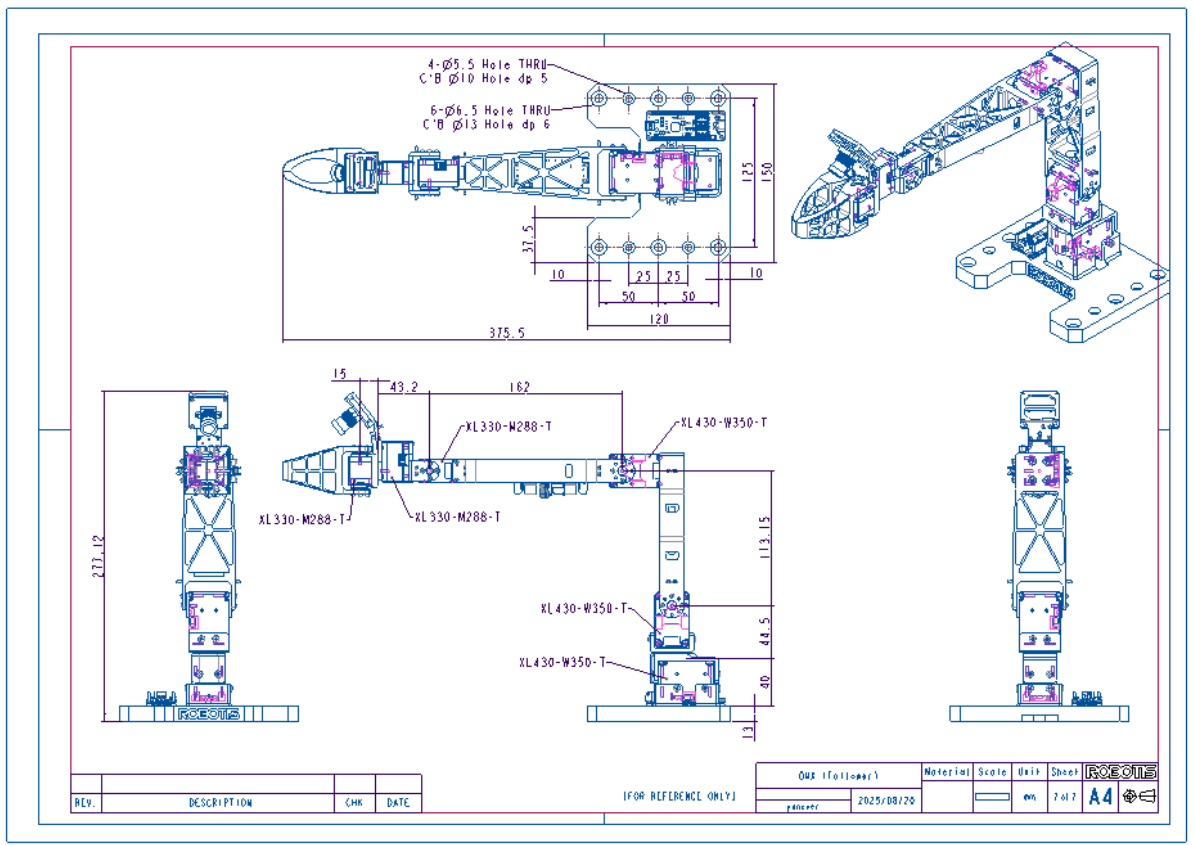
[OMX-F] Layout
Drawing Files
| File Type | Download Link |
|---|---|
| 📄 Download PDF |
3D Printable Parts
| File Type | Download Link |
|---|---|
| STEP | 📦 Download STEP |
| STL |