
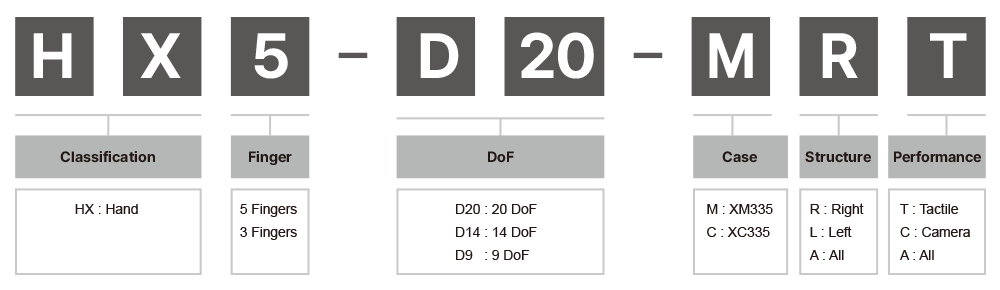
ROBOTIS Hand

Product Models
Specifications
High-DOF multi-finger robot hands designed for AI Worker / OMY platforms.
Main Specifications
| Item | Specification |
|---|---|
| Number of Fingers | 5 |
| Degrees of Freedom | 20 (4 DoF / 1 Finger) |
| Baud Rate | 9,600 bps ~ 6 Mbps (default: 4 Mbps) |
| Control Frequency | 1 kHz |
| Weight | 1,000 g ± 2% |
| Operating Voltage | 24 V |
| TIP Sensor | 9-array sensor, 0 ~ 255 value |
| Operating Mode | Direct Control Mode Preset Motion Mode |
| Maximum Load for Envelop | 15 kg |
| Max Finger Tip Force | 14 N |
| Peak Current | 2.6 A |
| Finger Actuator | XM335-T323-T |
| Operating Temperature | -5 ~ 55 ℃ |
| Command Signal | Digital Packet |
| Protocol Type | RS485 Asynchronous Serial (8bit, 1 stop, No Parity) |
| Physical Connection | RS485 Multidrop Bus |
| Standby Current | 370 mA |
| Feedback | Position, Velocity, Current, Temperature, Input Voltage, etc. |
Control & ID Mapping
Communication & Control Overview
| Category | Specification |
|---|---|
| Control Framework | ROS 2 + ros2_control |
| Bus Type | RS485 multidrop |
| Default Baudrate | 4 Mbps |
| Control Mode | Direct torque / position-level commands* |
| Command Format | DYNAMIXEL Protocol 2.0, Modbus-RTU |
* Exact low-level control mode and interfaces will be finalized with the ROS 2 drivers.
Device ID Assignment
| Side | Device | ID Range |
|---|---|---|
| Right | Hand Controller | 110 |
| Actuators | 111 ~ 135 | |
| Left | Hand Controller | 140 |
| Actuators | 141 ~ 165 |
Joint Configuration and Nomenclature
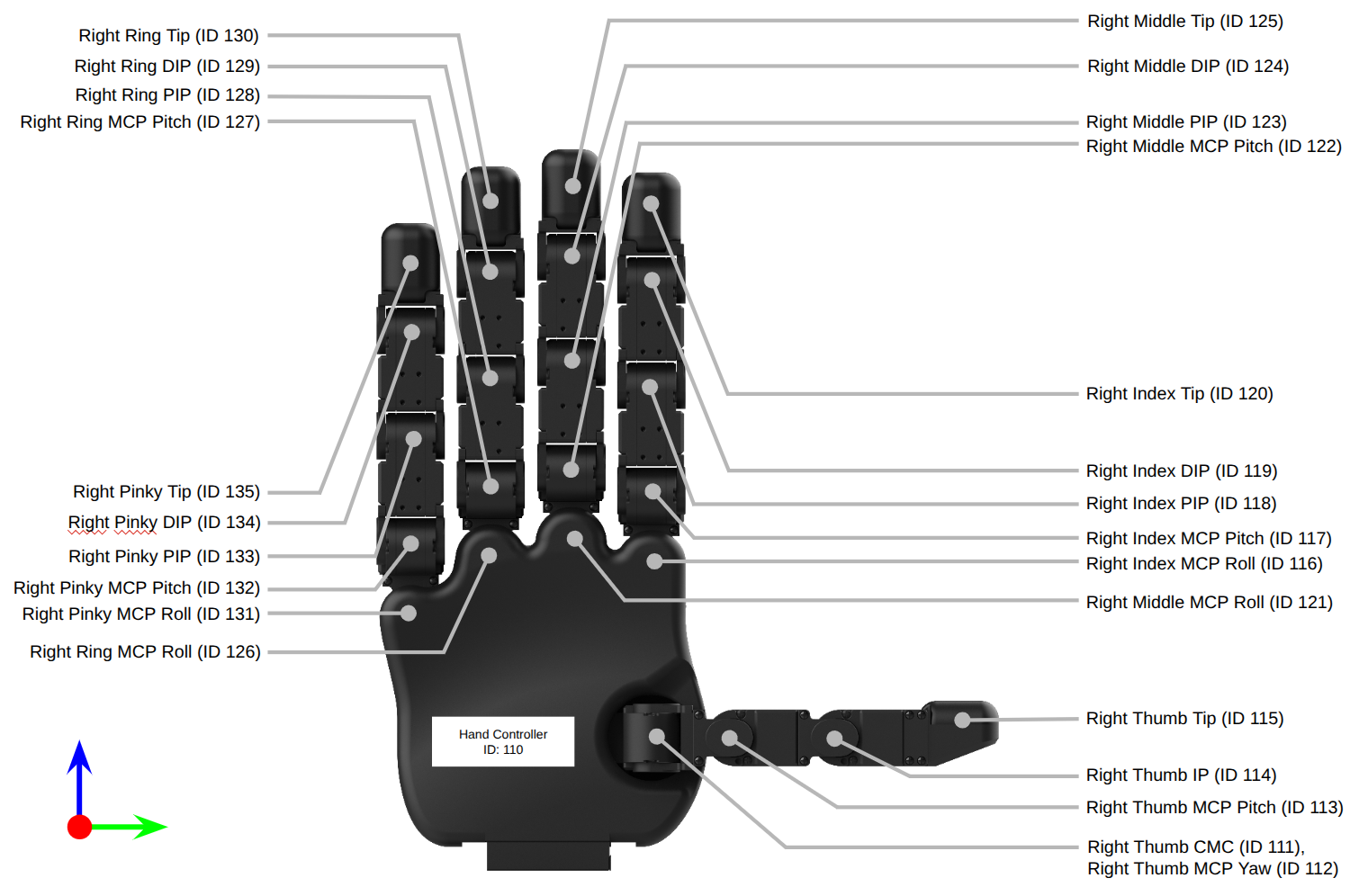
Right Hand
| ID | Joint Name | Technical Name | Range |
|---|---|---|---|
| 111 | Right Thumb CMC | finger_r_joint1 | -90° ~ 90° |
| 112 | Right Thumb MCP Yaw | finger_r_joint2 | -90° ~ 0° |
| 113 | Right Thumb MCP Pitch | finger_r_joint3 | 0° ~ 90° |
| 114 | Right Thumb IP | finger_r_joint4 | 0° ~ 90° |
| 116 | Right Index MCP Roll | finger_r_joint5 | -35° ~ 35° |
| 117 | Right Index MCP Pitch | finger_r_joint6 | 0° ~ 115° |
| 118 | Right Index PIP | finger_r_joint7 | 0° ~ 90° |
| 119 | Right Index DIP | finger_r_joint8 | 0° ~ 90° |
| 121 | Right Middle MCP Roll | finger_r_joint9 | -35° ~ 35° |
| 122 | Right Middle MCP Pitch | finger_r_joint10 | 0° ~ 115° |
| 123 | Right Middle PIP | finger_r_joint11 | 0° ~ 90° |
| 124 | Right Middle DIP | finger_r_joint12 | 0° ~ 90° |
| 126 | Right Ring MCP Roll | finger_r_joint13 | -35° ~ 35° |
| 127 | Right Ring MCP Pitch | finger_r_joint14 | 0° ~ 115° |
| 128 | Right Ring PIP | finger_r_joint15 | 0° ~ 90° |
| 129 | Right Ring DIP | finger_r_joint16 | 0° ~ 90° |
| 131 | Right Pinky MCP Roll | finger_r_joint17 | -35° ~ 35° |
| 132 | Right Pinky MCP Pitch | finger_r_joint18 | 0° ~ 115° |
| 133 | Right Pinky PIP | finger_r_joint19 | 0° ~ 90° |
| 134 | Right Pinky DIP | finger_r_joint20 | 0° ~ 90° |
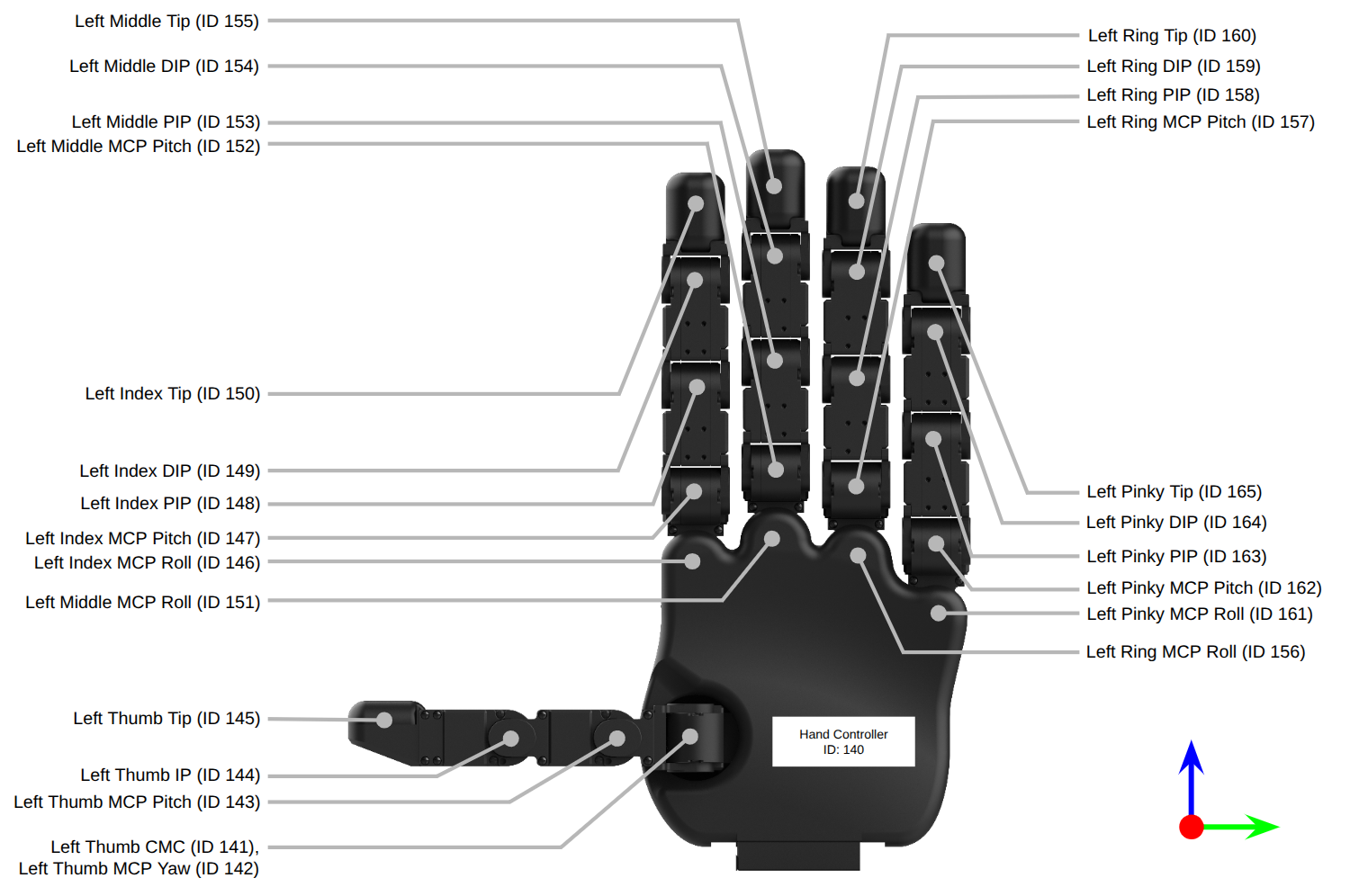
Left Hand
| ID | Joint Name | Technical Name | Range |
|---|---|---|---|
| 141 | Left Thumb CMC | finger_l_joint1 | -90° ~ 90° |
| 142 | Left Thumb MCP Yaw | finger_l_joint2 | 0° ~ 90° |
| 143 | Left Thumb MCP Pitch | finger_l_joint3 | -90° ~ 0° |
| 144 | Left Thumb IP | finger_l_joint4 | -90° ~ 0° |
| 146 | Left Index MCP Roll | finger_l_joint5 | -35° ~ 35° |
| 147 | Left Index MCP Pitch | finger_l_joint6 | 0° ~ 115° |
| 148 | Left Index PIP | finger_l_joint7 | 0° ~ 90° |
| 149 | Left Index DIP | finger_l_joint8 | 0° ~ 90° |
| 151 | Left Middle MCP Roll | finger_l_joint9 | -35° ~ 35° |
| 152 | Left Middle MCP Pitch | finger_l_joint10 | 0° ~ 115° |
| 153 | Left Middle PIP | finger_l_joint11 | 0° ~ 90° |
| 154 | Left Middle DIP | finger_l_joint12 | 0° ~ 90° |
| 156 | Left Ring MCP Roll | finger_l_joint13 | -35° ~ 35° |
| 157 | Left Ring MCP Pitch | finger_l_joint14 | 0° ~ 115° |
| 158 | Left Ring PIP | finger_l_joint15 | 0° ~ 90° |
| 159 | Left Ring DIP | finger_l_joint16 | 0° ~ 90° |
| 161 | Left Pinky MCP Roll | finger_l_joint17 | -35° ~ 35° |
| 162 | Left Pinky MCP Pitch | finger_l_joint18 | 0° ~ 115° |
| 163 | Left Pinky PIP | finger_l_joint19 | 0° ~ 90° |
| 164 | Left Pinky DIP | finger_l_joint20 | 0° ~ 90° |